stm32
restful
python
NAND
设计模式
一元函数微分学
脑电
固定解
python 技巧
图像阴影检测
非线性方程求解
ATECLOUD
SpringMVC的常见注解
File的构造方法
cve分析与复现
领域驱动设计
太空工程师
reference手册
命令链接按钮
猿如意
pose
2024/5/9 3:41:56
全网首发,人体姿态估计算法在OK3588上部署应用(十三)
一、主机模型转换
采用FastDeploy来部署应用深度学习模型到OK3588板卡上
进入主机Ubuntu的虚拟环境 conda activate ok3588 主机环境搭建可以参考上一篇 《OK3588板卡实现人像抠图(十二)》
生成onnx文件
cd FastDeploy
# 下载Paddle静态图模型并解压…
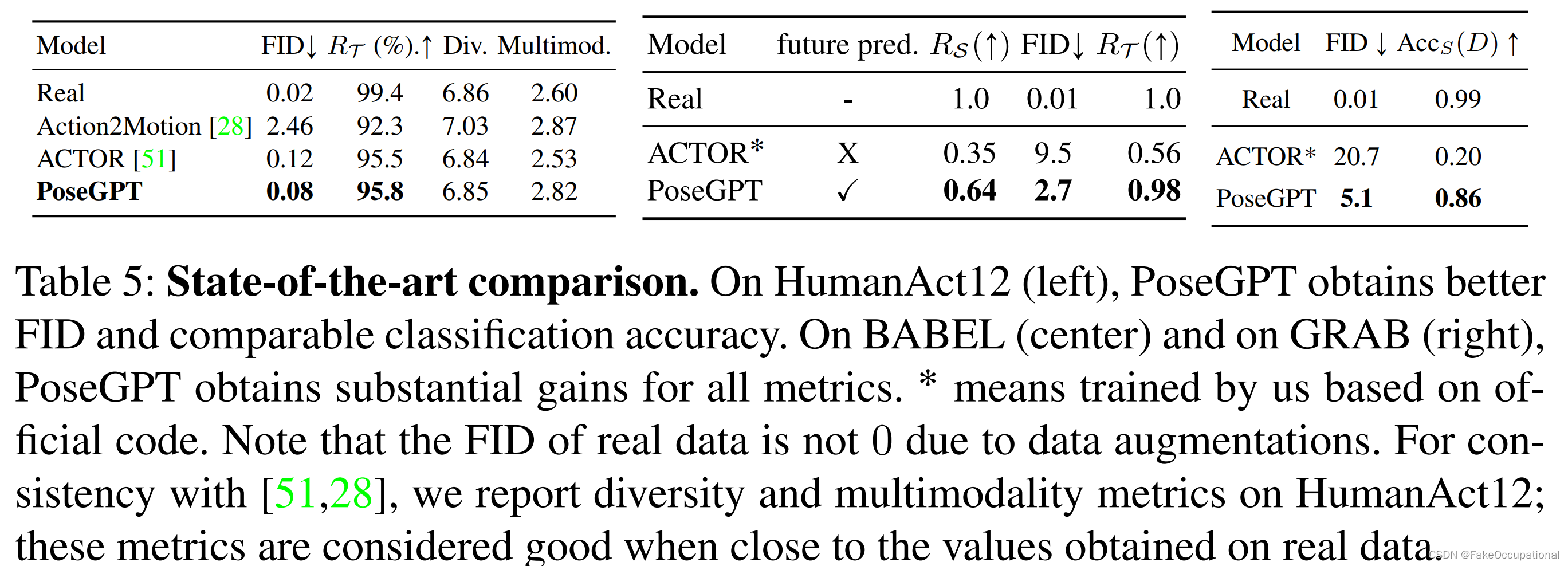
图片速览 PoseGPT:基于量化的 3D 人体运动生成和预测(VQVAE)
papercodehttps://arxiv.org/pdf/2210.10542.pdfhttps://europe.naverlabs.com/research/computer-vision/posegpt/
方法 将动作压缩到离散空间。使用GPT类的模型预测未来动作的离散索引。使用解码器解码动作得到输出。 效果 提出的方法在HumanAct12(一个标准但小规…
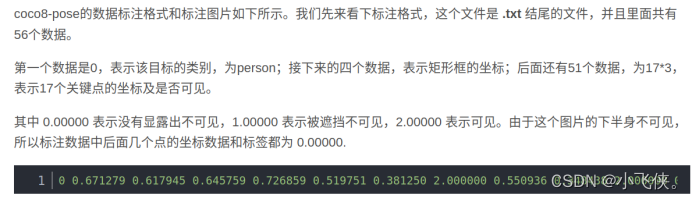
记录::关键点检测数据转化和可视化LSP、FLIC转yolov8-pose的txt
最近想试一下关键点检测的效果,先从yolov8-pose开始,不想跑coco那么大的数据集,就找了两个比较小的
yolov8-pose的txt数据格式如下: 类别、box、节点,数据做了归一化 可视化只显示了点,没有连线
参数&…

【ROS教程demo】用C++创建一个ROS节点,发布指令使得小海龟做圆周运动
ROS创建节点发布命令使得小海龟做圆周运动 1.任务需求2.任务分析2.1发布方topic和msg2.2接收方topic和msg2.3目标明确!3.创建ROS节点3.1创建发布方节点pub_pose3.2创建订阅方节点sub_pose1.任务需求 创建一个节点,在其中实现一个订阅者和一个发布者,完成以下功能: 发布者:…