chatgpt专题
ESP8266
信息安全
跳槽
excel
产品经理
Hudi
资源
注释
元开发
beautifulsoup
Lock
桌面聊天系统
Revit二次开发
Java中的打印流
android教程
verilog
地图制图
angular.js
分布式光纤测温
机械臂
2024/4/11 20:30:43
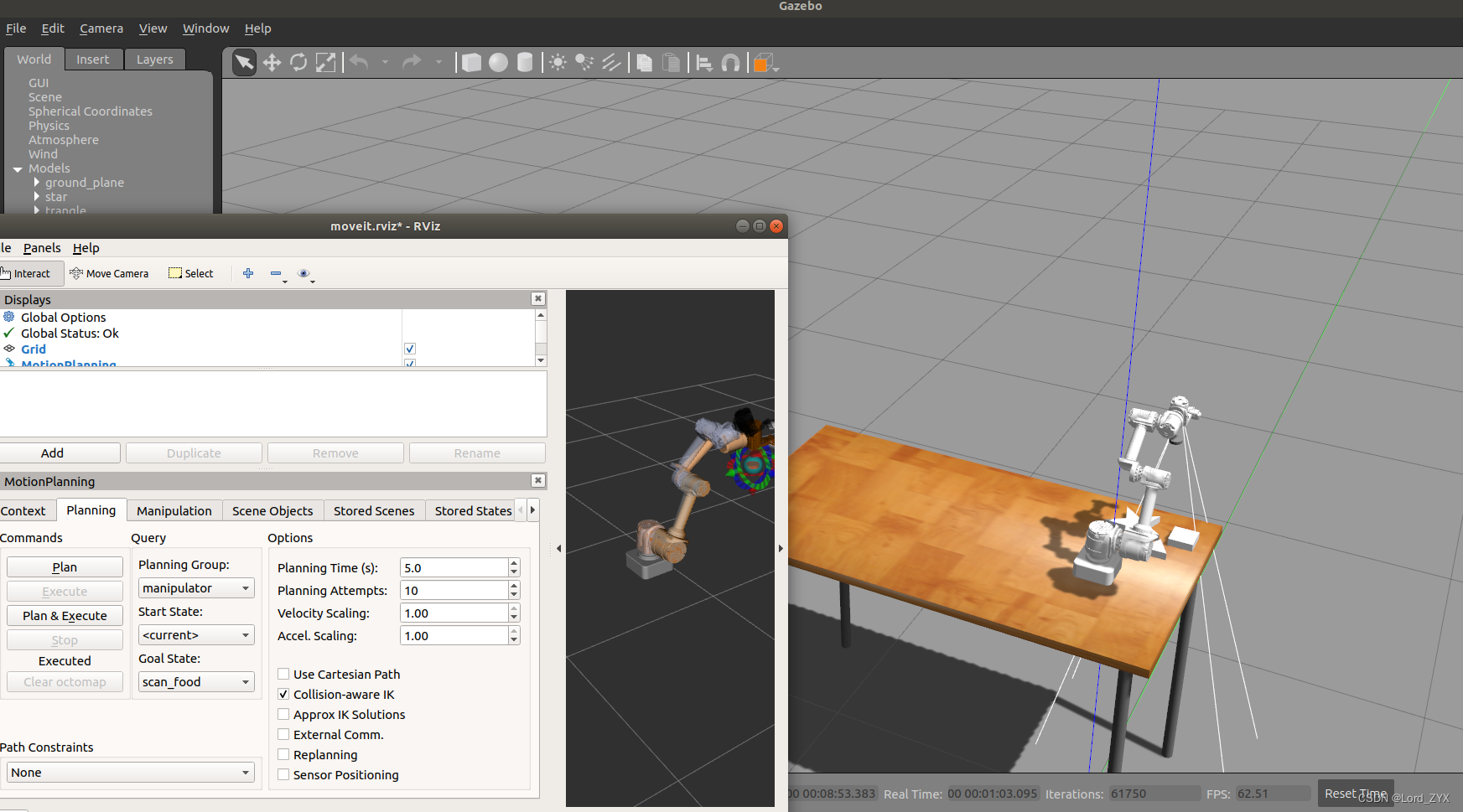
结合大象机器人六轴协作机械臂myCobot 280 ,解决特定的自动化任务和挑战!(上)
项目简介 本项目致力于探索和实现一种高度集成的机器人系统,旨在通过结合现代机器人操作系统(ROS)和先进的硬件组件,解决特定的自动化任务和挑战。一部分是基于Jetson Orin主板的LIMO PPRO SLAM雷达小车,它具备自主导航…
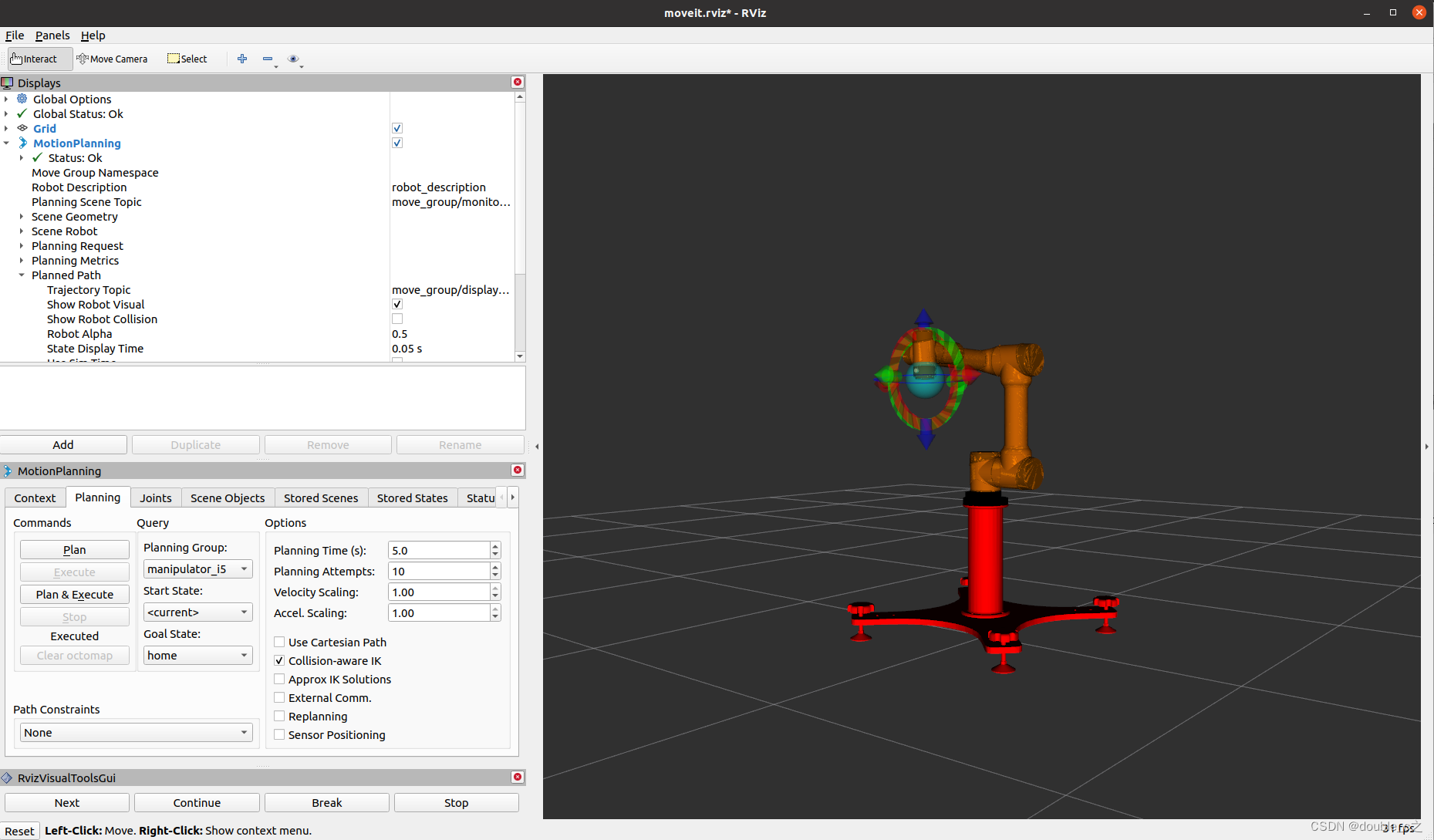
ubuntu20.04安装ros并配置相关环境以及驱动AUBO i5机械臂
ubuntu20.04安装ros并配置相关环境以及驱动AUBO i5机械臂 安装ros安装rosdep(小鱼的rosdepc,又快又好用)环境配置下载并编译aubo roslib库环境变量配置aubo gazeboaubo rviz驱动真实机械臂 安装ros
搜索鱼香ros网站https://fishros.com/,根据一键安装ros里提供的指…
【现代机器人学】学习笔记一:位形空间
由于工作的关系,一年前开始接触机械臂。与此同时也在学习【现代机器人学】与【机器人学导论】两本书,感觉【现代机器人学】写的更好一些。大致走马观花的看了一遍,确实有所收获。因此想再从头过一遍,做一些总结,写给自…
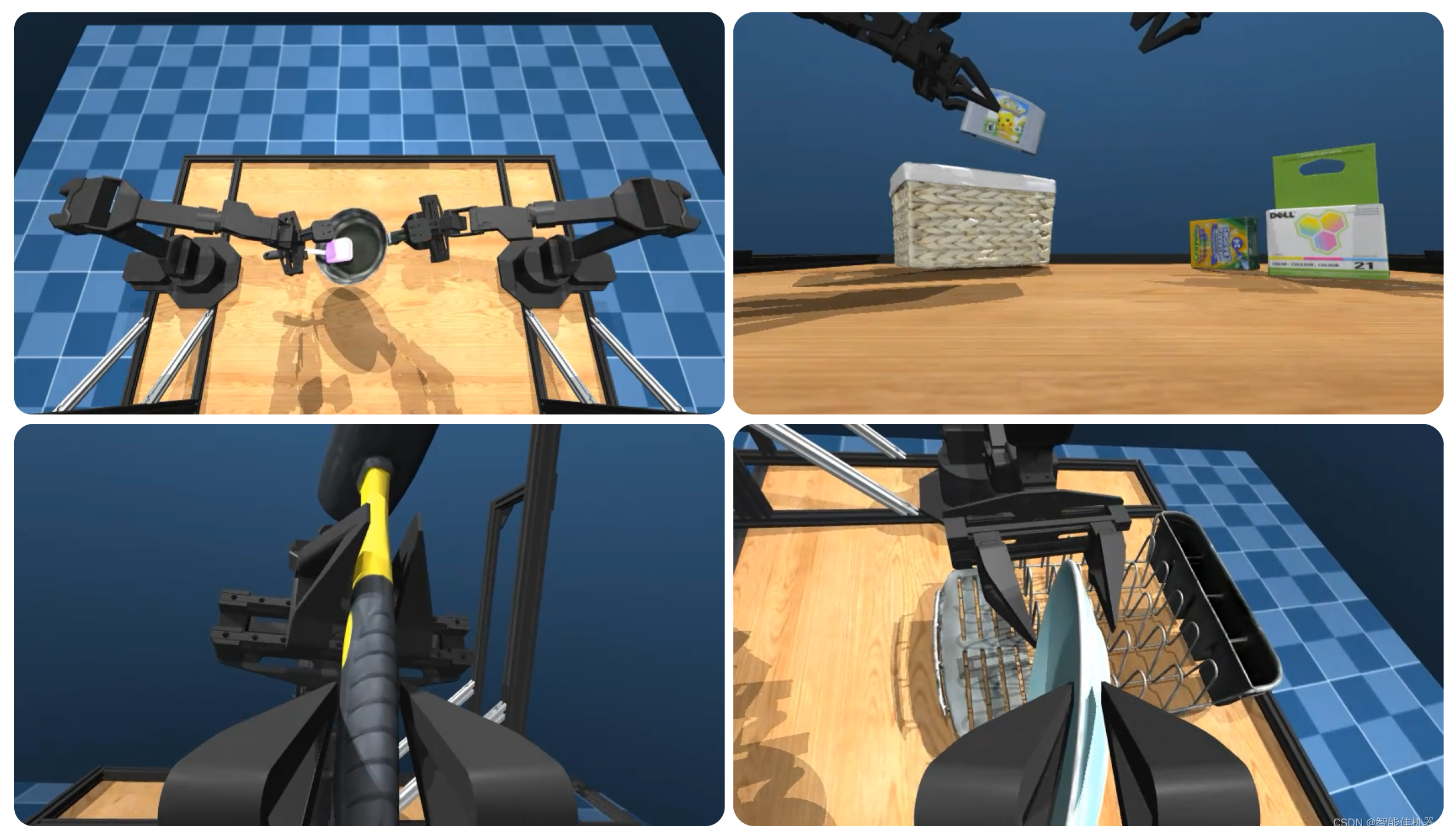
国内也可以直接采购谷歌与斯坦福联合开发的ALOHA 2双臂协作开源平台了
2024年 1 月,谷歌 DeepMind 联合斯坦福推出了 ALOHA 的增强版本 —ALOHA 2。与一代相比,ALOHA 2 具有更强的抓持性能、更符合人体工程学设计和更强的稳健性,并且在国内就可以直接采购,整套成本还不到 20 万元人民币。 可订购的套装…
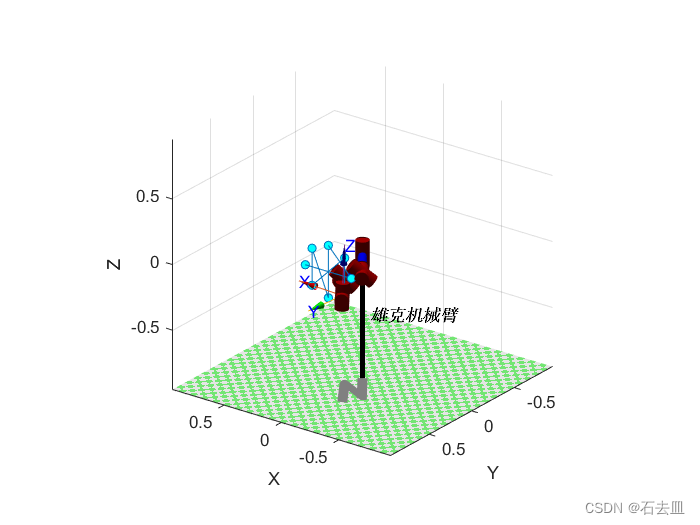
5自由度雄克机械臂仿真描点
5自由度雄克机械臂仿真描点 任务
建立雄克机械臂的坐标系和D-H参数表,使用Matlab机器人工具箱(Robotics Toolbox),用机械臂末端执行器触碰8个红色的目标点。
代码
%% 机器人学
format compact
close all
clear
clc%% DH参数
L…
MATLAB - 机器人关节空间运动模型
系列文章目录 前言
关节空间运动模型描述了在闭环关节空间位置控制下机械手的运动,在关节空间运动模型(jointSpaceMotionModel)对象和关节空间运动模型块中使用。
机器人机械手是典型的位置控制设备。要进行关节空间控制,需要指…
开源七轴myArm协作机械臂正逆运动学技术讲解
引言: 在本文中,我们将深入探讨机器人学的两个核心概念:正运动学和逆运动学。这两个概念是理解和控制机械臂运动的基础。通过一个具体的7轴机械臂实例,我们将详细介绍如何计算机械臂的正运动学和逆运动学。我们首先会解释正运动学…
大象机器人发布万元级水星Mercury人形机器人产品系列,联结未来,一触即达!
十四五机器人产业发展规划指出机器人的研发、制造、应用是衡量一个国家科技创新和高端制造业水平的重要标志。当前,机器人产业蓬勃发展,正极大改变着人类生产和生活方式,为经济社会发展注入强劲动能。 人形机器人作为机器人产业中重要的一环&…
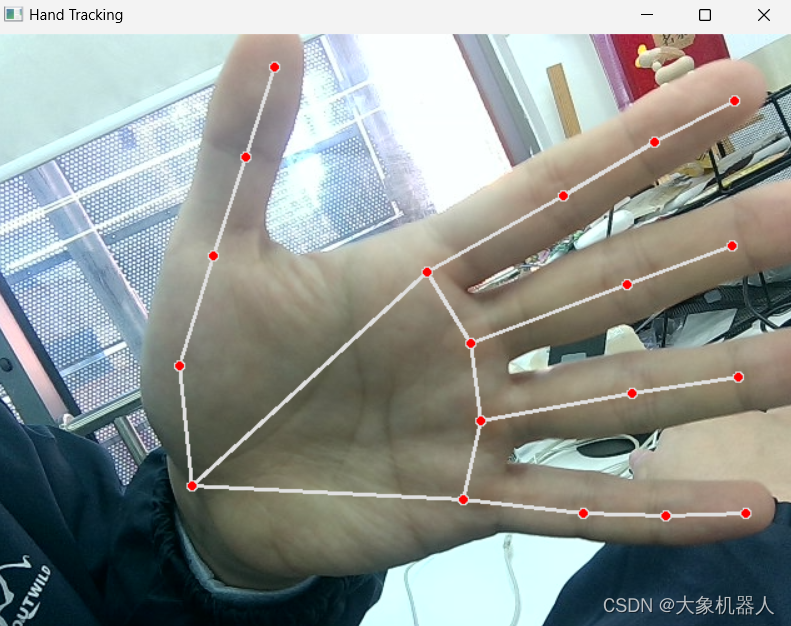
大象机器人六轴协作机械臂myCobot 320 进行手势识别
引言 我是一名专注于机器学习和机器人技术自由者。我的热情始于大学期间的人工智能课程,这促使我探索人机交互的新方法。尤其对于机械臂的操作,我一直想要简化其复杂性,使之更加直观和易于使用。 这个项目的灵感源自于我对创新技术的热爱以及…
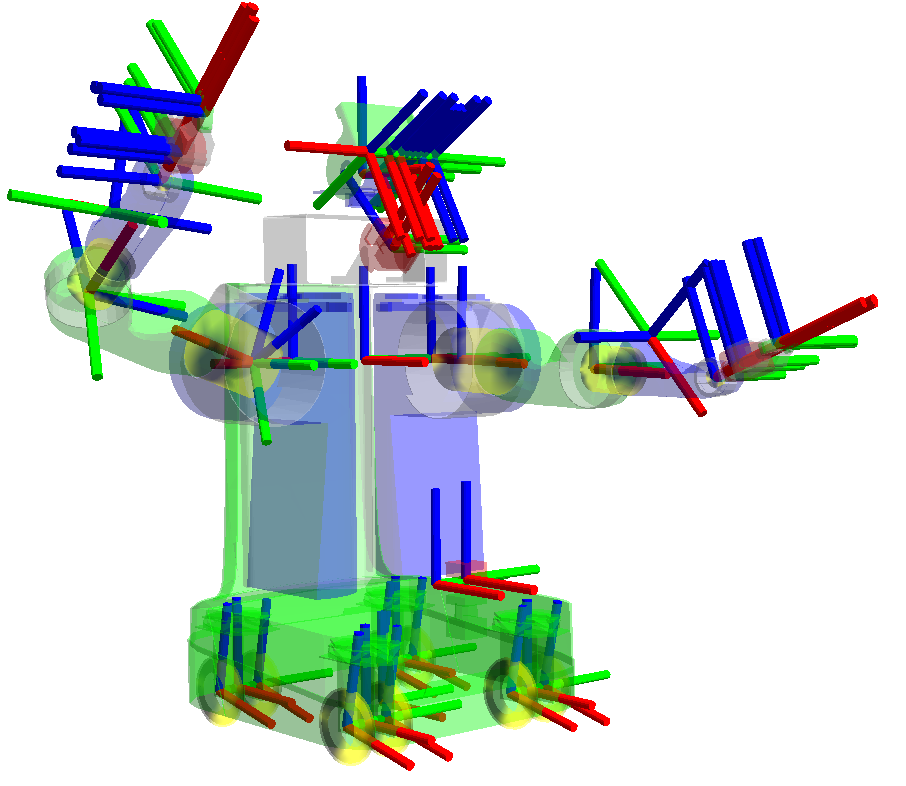
使用ROS与Movelt实现myCobot 280运动轨迹规划和控制
ROS的技术案例 Introduction 今天这篇文章将记录我使用myCobot 280 M5stack 在ROS当中是如何使用的。为什么使用ROS呢,因为提及到机器人都离不开ROS这个操作系统,今天是我们第一次使用ROS这个系统。 今天我将从ROS的介绍,环境的配置以及mycob…
article-六轴机械臂(带抓手)运动学分析+轨迹规划
1正运动学分析
采用标准的D-h法进行机械腿模型分析: D-h表如下 (2)通过(1)求解出机器人各位姿变换矩阵后,求解机器人手臂变换矩阵
** **
。通过matlab 计算,写出机器人末端位置。
正运动学分…
4自由度串联机械臂按颜色分拣物品功能的实现
1. 功能说明 本实验要实现的功能是:将黑、白两种颜色的工件分别放置在传感器上时,机械臂会根据检测到的颜色,将工件搬运至写有相应颜色字样区域。 2. 使用样机
本实验使用的样机为4自由度串联机械臂。 3. 运动功能实现
3.1 电子硬件
在这个…
realman——使用Moveit控制Gazebo中的机械臂
文章目录 概述新建工作区配置说明MoveIt端的配置机器人端的配置关节轨迹控制器关节状态控制器运行效果可能存在的问题概述
MoveIt!与 Gazebo 的联合仿真,其主要思路为搭建 ros_control 和 MoveIt!的桥梁。先在 MoveIt!端配置关节和传感器接口 yaml 文件,将其加载到 rviz 端;…

V-REP+Matlab 七自由度冗余机械臂DH矩阵与运动学逆解
https://www.jianshu.com/p/a31ae1d2c1a2 最终效果 有些延迟,可能是我电脑太辣鸡.
以及用机器人工具箱建立的机械臂的DH矩阵的显示如下:
这个机械臂即V-rep中的example的第一个,注意使用时要先将IK group删除,删掉dummy之间的link.
Matlab中的代码:
建立DH矩阵:
clear
de…

利用人工智能和机器人技术实现复杂的自动化任务!
这篇mylangrobot项目由neka-nat创建,本文已获得作者Shirokuma授权进行编辑和转载。 https://twitter.com/neka_nat GitHub-mylangrobot :GitHub - neka-nat/mylangrobot: Language instructions to mycobot using GPT-4V 引言 本项目创建了一个使用GPT-4…

Universal Robot——用ros_control控制UR5机器人(如何调整PID控制器)
在上一个教程中,我们在Gazebo中设置了UR5机器人,并意识到我们需要一些控制器来移动我们的机器人。Ros_control是一个帮助控制器实现和硬件抽象的包。这是一种为我们的关节设置低级控制的简便方法。在本教程中,我们将看到如何安装ros_control,用每个关节的位置控制器扩展URD…
遨博I20协作臂关节逆解组Matlab可视化
AUBO I20协作臂关节逆解组Matlab可视化 前言1、RTB使用注意点2、代码与效果2.1、完整代码2.2、运行效果 总结 前言
注意:请预先配置好Matlab和RTB机器人工具箱环境,本文使用matlab2022b和RTB10.04版本
工作需要,使用matlab实现对六轴机械臂…
Sawyer 机器人 ROS SDK 配置
系列文章目录
目录
系列文章目录
前言
恢复出厂设置
内容
概述
要求
程序
将 Sawyer 升级到 Intera SDK 打印
内容
概述
先决条件
安装步骤
将机器人从 Intera MFG 切换到 SDK 模式
联网
内容
确认 Sawyer 在机器人上以 SDK 模式运行
基本
基本要求
网络…
从零开始的机械臂yolov5抓取gazebo仿真(四)
Moveit与Gazebo联合仿真
上一篇博客已经将moveit!配置完毕,然而想要让moveit!控制gazebo中的机械臂,还需要进行一些接口的配置。现在我们有的功能包为sunday_description、sunday_moveit_config这两个功能包。且已经配置好xacro文件,本篇内容…
MATLAB 机械臂逆运动学进行轨迹控制建模
系列文章目录 文章目录 系列文章目录前言一、模型概览1.1 Target Pose Generation 目标姿势生成1.2 Inverse Kinematics 逆运动学1.3 Manipulator Dynamics 机械手动力学1.4 Pose Measurement 姿势测量 二、机械手定义三、生成航点四、模型设置五、模拟机械手运动六、将结果可视…
从零开始的机械臂yolov5抓取gazebo仿真(导航贴)
本篇博客为《从零开始的机械臂yolov5抓取gazebo仿真》系列的导航贴
该导航帖将会不断更新
从零开始的机械臂yolov5抓取gazebo仿真视频链接:项目视频链接
一.教程部分
从零开始的机械臂yolov5抓取gazebo仿真系列目录如下 1.在SolidWorks中将机械臂模型导出机械臂…
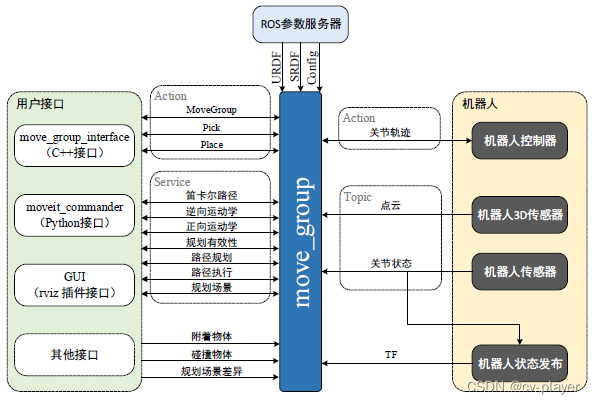
ROS学习笔记(九):MoveIt!与机械臂控制
ROS学习笔记(九):MoveIt!与机械臂控制 MoveIt!简介MoveIt!系统架构MoveIt!编程与机械臂控制关节空间规划工作空间规划笛卡尔运动规划避障规划 Pick and Place示例 MoveIt!简介
Move…
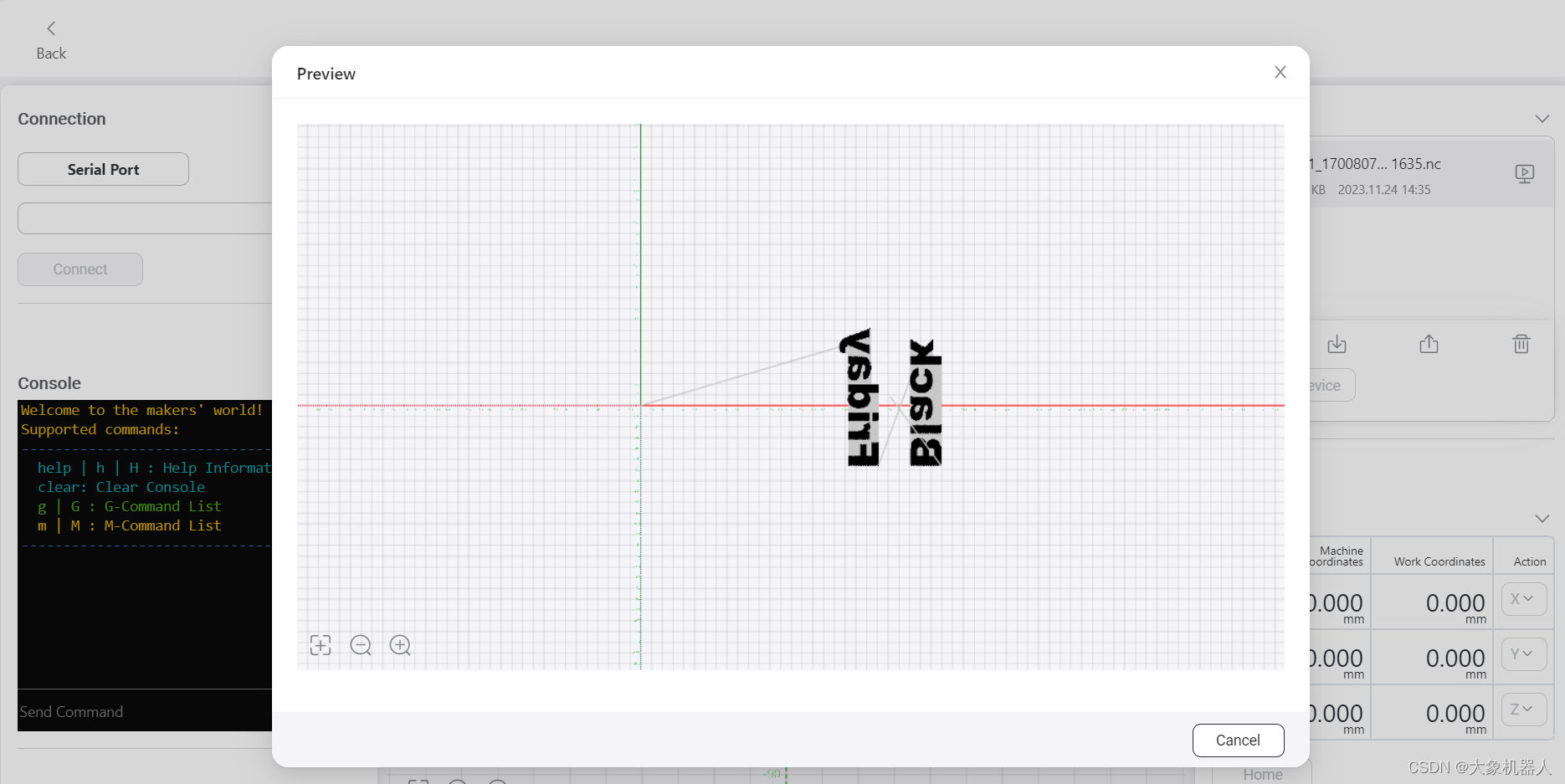
开源四轴协作机械臂ultraArm激光雕刻技术案例!
注意安全事项 开始之前,请确保您已采取适当的安全措施,例如用于激光操作的防护眼镜、灭火器和通风良好的区域。 引言 随着科技的不断进步,激光雕刻技术已经成为当今制造行业中不可或缺的一部分。它以其高精度、高效率和广泛的材料适应性&…
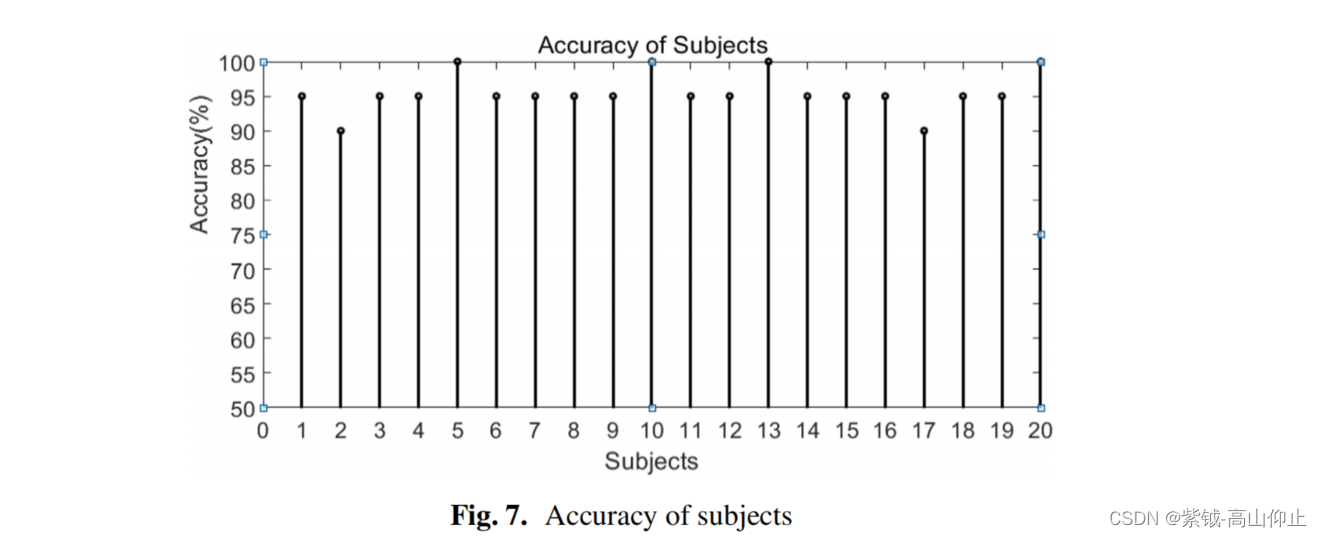
【脑机接口论文与代码】 基于自适应FBCCA的脑机接口控制机械臂
Brain-Controlled Robotic Arm Based on Adaptive FBCCA 基于自适应FBCCA的脑机接口控制机械臂论文下载:算法程序下载:摘要1 项目介绍2 方法2.1CCA算法2.2FBCCA 算法2.3自适应FBCCA算法 3数据获取4结果4.1脑地形图4.2频谱图4.3准确率 5结论 基于自适应FB…
机械臂的零力拖动和直接示教
机械臂的零力拖动(Zero Force Control)指的是在机械臂的关节没有输出扭矩的状态下,利用外力使其产生运动的一种方式。
其基本原理是:1. 先切断机械臂关节的控制器,使关节不能输出扭矩。
2. 然后人工对机械臂施加外力,带动其执行运动。
3. 这时由于关节输出扭矩为零,机械臂会…

Matlab 在一张图中画多个机械臂
在matlab中第一次画机械臂时,可能会出现的问题是Link函数不识别(如出现Link输入参数不对等) 这大概率是因为缺少matlab工具箱,如图 需要下载该软件包,然后用Matlab打开,就能自动安装到matlab中。下载地址在这个超链接…
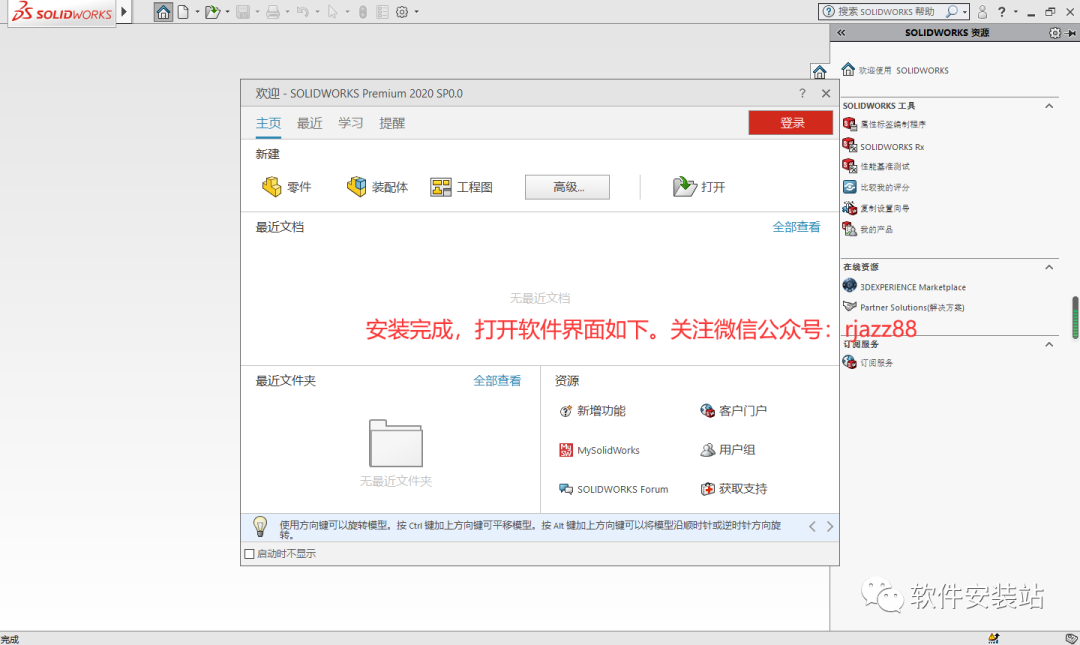
SolidWorks2020安装教程(超详细图文教程)
目录
一.简介
二.安装步骤 SolidWorks2020(64位)百度网盘下载地址:
链接:
https://pan.baidu.com/s/1F9bb1WKdl-_LlQ_tpYV-4w
密码:umly 一.简介
SolidWorks软件是世界上第一个基于Windows开发的三维CAD系统&…
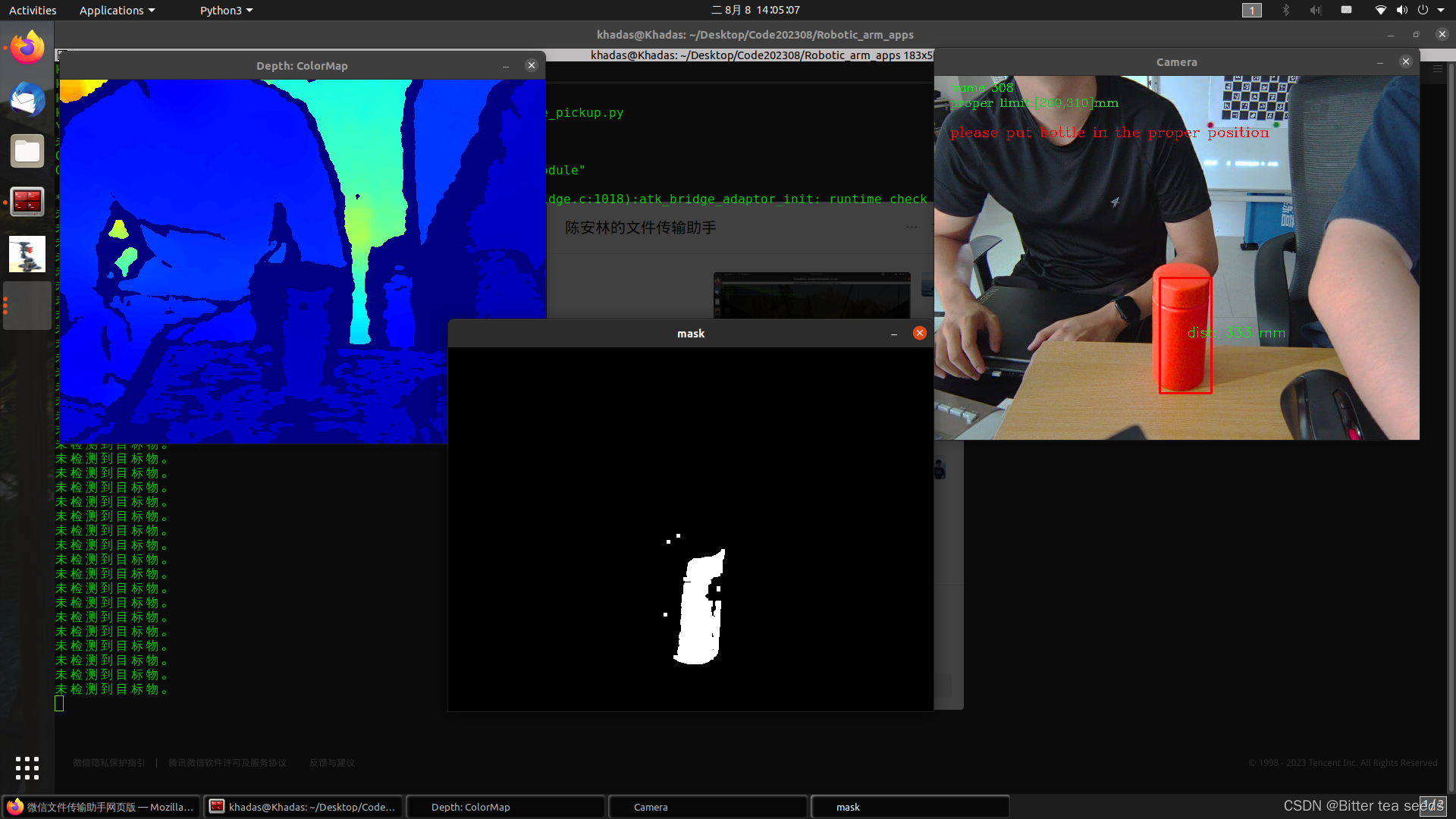
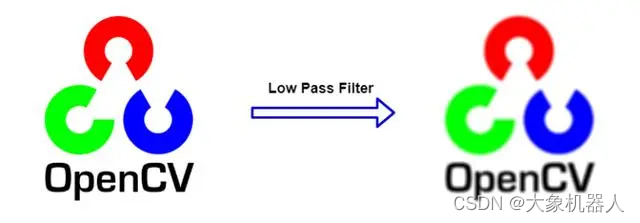
OpenCV实验箱---机械臂自由抓取例程开发使用手册
目录
一、项目介绍 项目背景: 相机型号:
二、机械臂自由抓取演示 使用注意事项: 操作步骤:
三、核心代码讲解
① 机械臂相关运动驱动代码
② BGR图像转换伪彩色深度图像代码
③ 目标跟随及抓取动作代码 开发者:…
Arduino实现简易颜色识别机械臂
机械臂 一 功能原理1 硬件设备2 arduino库3 工作原理 二 代码设计全局参数1 颜色识别2 机械臂转动3 机械臂复位 三 展示效果 一 功能原理
识别出不同颜色的物体,让机械臂进行夹取并放入不同位置。
1 硬件设备
2 arduino库
3 工作原理 二 代码设计
项目重点划分…
七轴开源协作机械臂myArm视觉跟踪技术!
引言 ArUco标记是一种基于二维码的标记,可以被用于高效的场景识别和位置跟踪。这些标记的简单性和高效性使其成为机器视觉领域的理想选择,特别是在需要实时和高精度跟踪的场景中。结合机器学习和先进的图像处理技术,使用ArUco标记的机械臂系统…

机械臂<四大家族>你知道多少
一、背景
随着机器人技术的不断成熟,国内外涌现出许多机器人(特指机械臂)公司,如:
1.思灵机器人(Agile Robots)
创始人兼全球CEO陈兆芃于2018年,在德国慕尼黑创办思灵机器人。陈兆…

垃圾分类:人机搭配,干活不累
场景描述:垃圾分类最近成为上海最受关注的话题,市民们已经快被繁杂的垃圾类别逼疯。不过,人工智能技术早已学会了垃圾分类。通过深度学习、神经网络,训练机械臂像人一样识别垃圾进行分类,效率远高于人工分类࿰…

基于 Arduino和WiFi 远程控制小车加机械臂
花了两周的时间的,和同学一起做了一个遥控小车,上面又加了一个机械臂。总之收获颇丰。
设计使用了一个Arduino UNO 开发板,四个舵机,一个DT-06 TTL WiFi模块,一个L298N电机驱动板(红板) &#…
Moveit1 机器人配置包超详细解析
前言
Moveit的robot_moveit_config包里有很多文件,在配置时容易搞不清关系,导致配置过程艰难、漫长。
同时互联网上的文档几乎没有详细介绍这部分配置包的,大神各有各的配法,比较混乱。
因此笔者整理了配置包内各个重要的文件&…
使用ChatGPT学习大象机器人六轴协作机械臂mechArm
引言 我是一名机器人方向的大学生,近期学校安排自主做一个机器人方面相关的项目。学校给我们提供了一个小型的六轴机械臂,mechArm 270M5Stack,我打算使用ChatGPT让它来辅助我学习如何使用这个机械臂并且做一个demo。 本篇文章将记录我是如何使…
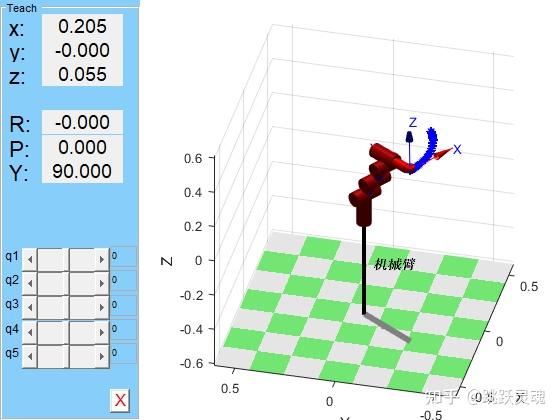
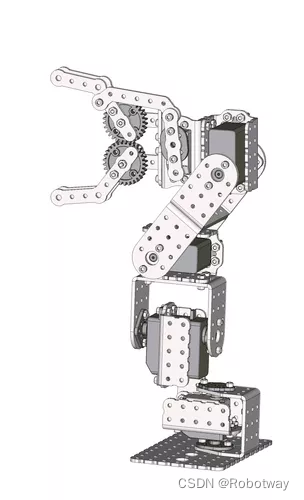
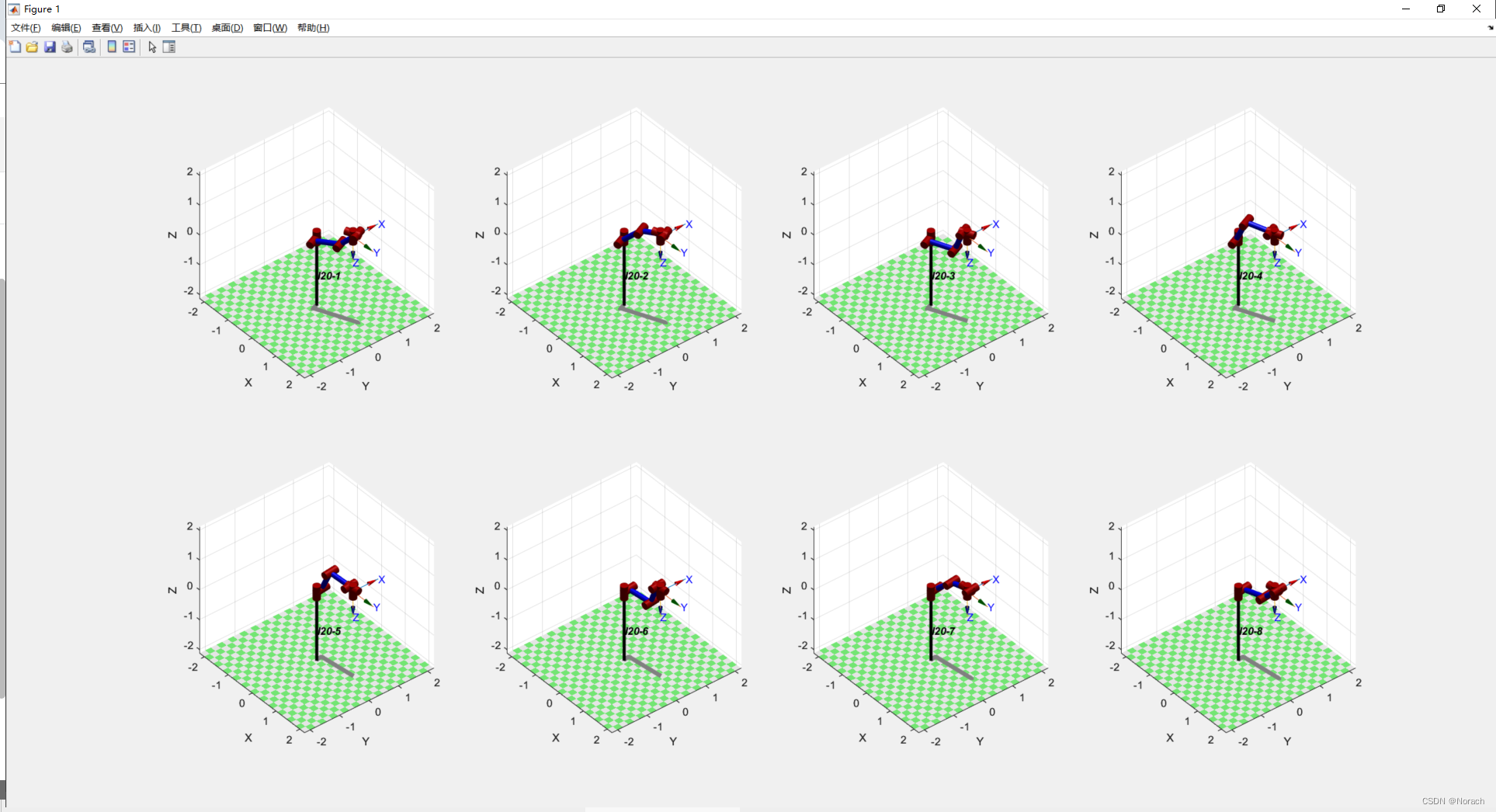
使用 matlab 的 Robotics ToolBox 完成5自由雄克机械臂的建模与运动学仿真,并计算8个点的运动轨迹,绘制运动动画
机器人包含5个关节,建立以下的DH参数表 matlab代码
%机器人学导论仿真大作业(RTB)
clear
clc
h figure;
axis tight manual
filename SchunkRobot_Simulation.gif;%Schunk机械臂参数的输入
L10.35;
L20.305;
L30.3;%DH参数建立
Joint1 L…