OD
python爬虫兼职
cnn
端口号
数据统计
池化
网上书店
微信小程序登录
Java项目
readelf
junit
策略模式
API接口开发系列
i18next
CSS选择器
秒定时器
设备管理平台
Gerber
BP神经计算
dos命令行
点云
2024/4/11 15:03:00
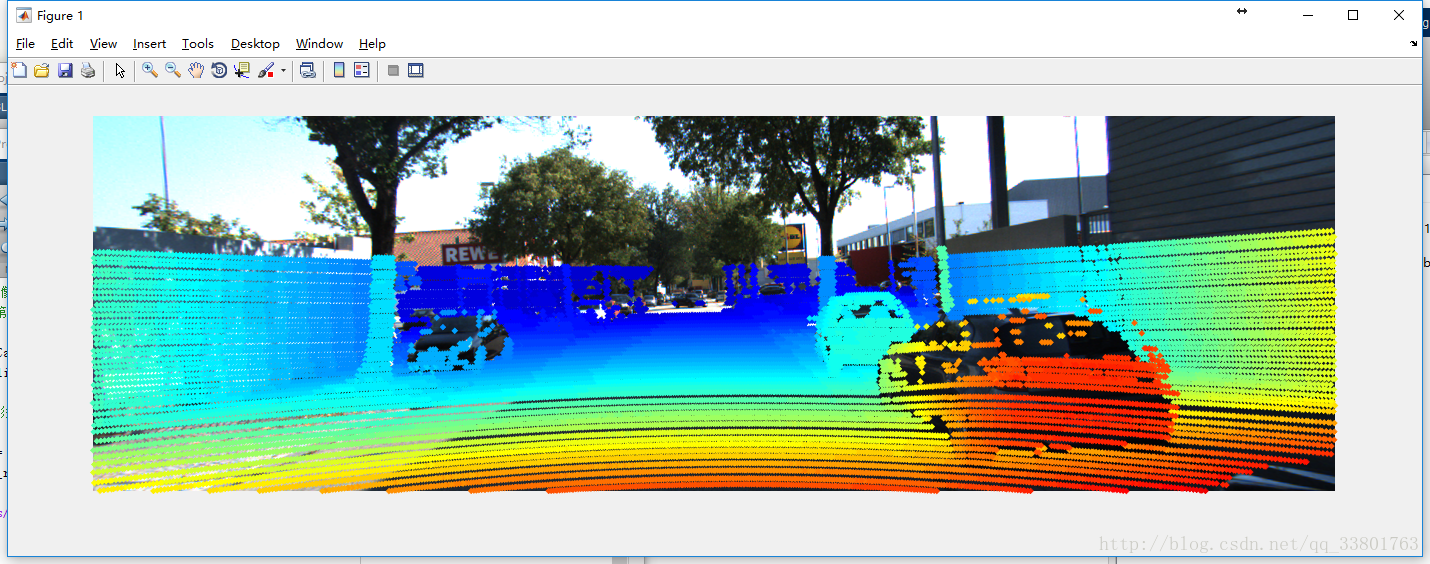
处理点云数据(一):点云与生成鸟瞰图
点云数据
点云数据一般表示为N行,至少三列的numpy数组。每行对应一个单独的点,所以使用至少3个值的空间位置点(X, Y, Z)来表示。 如果点云数据来自于激光雷达传感器,那么它可能有每个点的附加值,在KITTI数据中就有一个“反射率…

点云从入门到精通技术详解100篇-双传感器模式的非结构化环境检测与识别(续)
目录
3.3 KD-Tree算法点云特征提取
3.3.1 KD-Tree算法的基本原理
3.3.2边沿点提取
3.4道路边沿线拟合验证

PCL - MLS代碼研讀(十四)- DISTINCT_CLOUD上採樣方法
PCL - MLS代碼研讀(十四)- DISTINCT_CLOUD上採樣方法
前言
在PCL - MLS代碼研讀(十一)- computeMLSPointNormal函數中已經介紹了NONE和SAMPLE_LOCAL_PLANE上採樣方法,並且在PCL - MLS代碼研讀(十三&#…
PCL - ICP代碼研讀(八 ) - transformCloud函數
PCL - ICP代碼研讀(八 ) - transformCloud函數前言transformCloud前言
如PCL - ICP代碼研讀(六 ) - IterativeClosestPoint架構中所介紹的,transformCloud函數用於對輸入點雲的XYZ坐標及法向量做剛體變換。
本篇中介…

python点云可视化
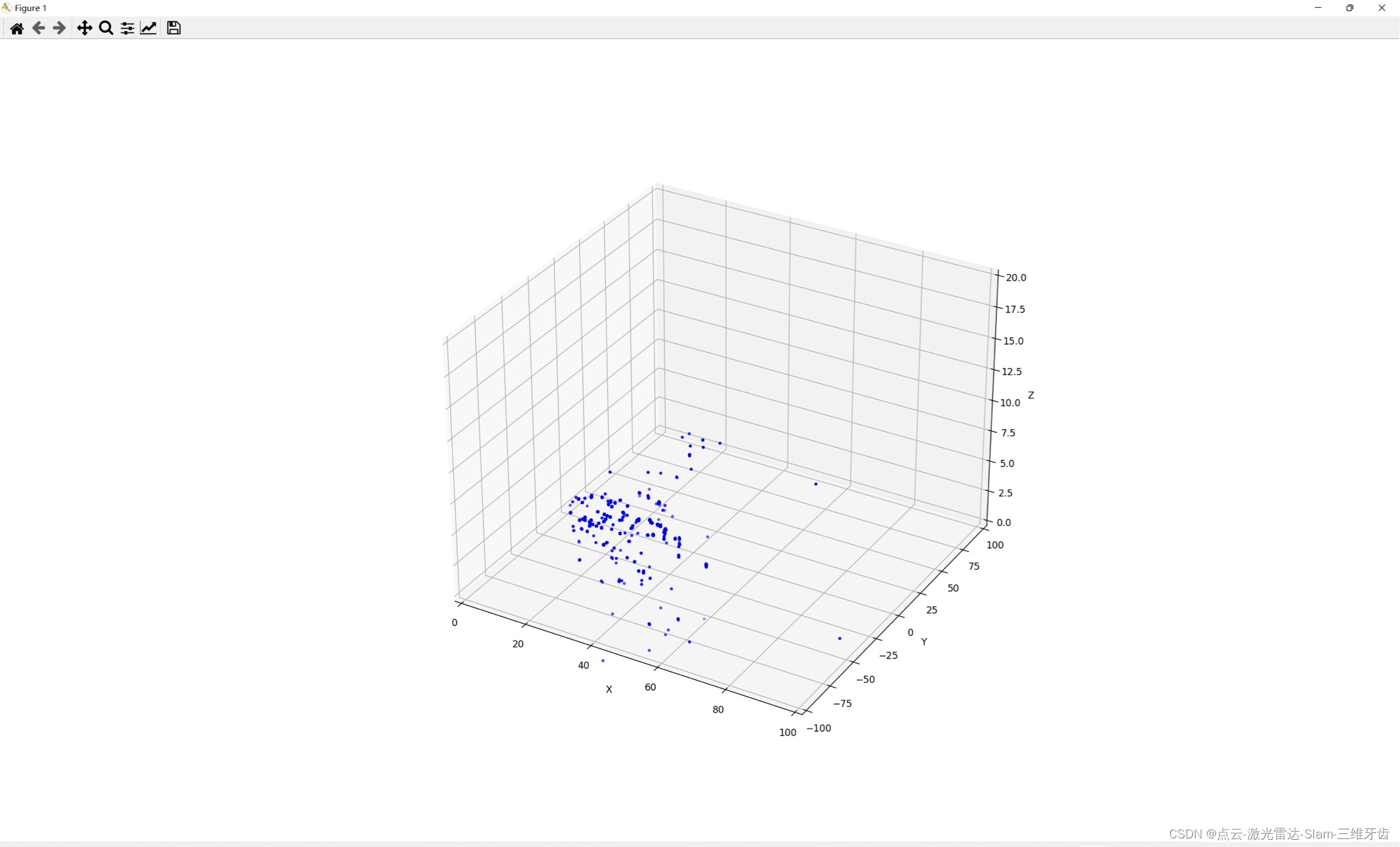
Python三种点云可视化方案:mayavi、matplotlib、CloudCompare。
方案一:mayavi可视化点云
安装方式:
pip install mayavi
可视化代码:其中airplane_0001.txt数据下载地址为:modelnet40点云样例数据-深度学习文档类…
PCL - ICP代碼研讀(十九 ) - CorrespondenceRejectorDistance實現
PCL - ICP代碼研讀(十九 ) - CorrespondenceRejectorDistance實現前言getRemainingCorrespondences函數前言
getRemainingCorrespondences函數是CorrespondenceRejector類別的核心,由CorrespondenceRejector的子類別各自實作。
它接受origi…
【PCL】(三)读写PCD文件
文章目录 (三)读写PCD文件写读 (三)读写PCD文件
写
首先,创建一个名为pcd_write.cpp的文件,并在其中写入以下代码:
#include <iostream>
#include <pcl/io/pcd_io.h>
#include &…

python点云拼接
点云拼接主要是把不同的点云拼接到一起。通常,为了获得一个完整物体的三维点云,我们可能会在不同的视点进行数据采集,然后把采集的点云数据拼接到一起。 由于视点的不同,所采集到的多个点云的坐标系也会不一致。 为了解决坐标系不…
根据平面abcd 参数生成平面点云(附 open3d 代码)
这段代码用于生成一个平面的点云数据,其中平面由参数化方程 Ax + By + Cz + D = 0 描述。
定义了平面的参数 `plane_params`。在给定的示例中,平面的参数是 `[1, 1, 1, 10]`,也就是 A=1,B=1,C=1,D=10。
接下来,定义了平面的长度和宽度,即 `plane_length` 和 `plane_w…
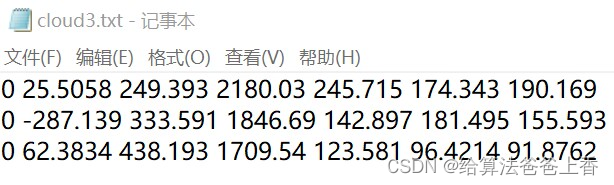
fast lio 2 保存每一帧的点云PCD和里程计矩阵 Odom 在txt文件
修改了源代码的 laserMapping.cpp 文件,替换为下面的代码就可以保存了,注意里面有一个路径,需要修改为你的电脑的路径 // This is an advanced implementation of the algorithm described in the
// following paper:
// J. Zhang and S. Singh. LOAM: Lidar Odometry an…
MATLAB 平面拟合并旋转到水平面 (43)
MATLAB 平面拟合并旋转到水平面 (43) 一、算法介绍二、算法实现1.代码2.结果一、算法介绍 点云拟合平面并置平的算法是指对给定的点云数据进行平面拟合,并将拟合得到的平面调整至水平位置的过程。这个算法通常用于处理三维空间中的点云数据,例如在计算机视觉、三维重建和机…
ply 点云文件格式
英文版 ply格式 http://paulbourke.net/dataformats/ply/
典型的 PLY 文件结构: 头部 顶点列表 面片列表 (其他元素列表)
头部是一系列以回车结尾的文本行,用来描述文件的剩余部分。头部包含一个对每个元素类型的描述&a…
PCL - MLS代碼研讀(四)- 偏微分計算函數
PCL - MLS代碼研讀(四)- 偏微分計算函數前言getPolynomialPartialDerivative前言
本篇延續PCL - MLS代碼研讀(二),繼續介紹偏微分計算函數。
getPolynomialPartialDerivative
還記得在PCL - MLS代碼研讀(…
机器学习笔记 - 如何在Python中对网格和点云进行体素化?
一、简述 本文主要是为了了解如何生成体素表示,体素之于3D就像像素之于2D。体素本质上是 3D 像素,但它们不是正方形,而是完美的立方体。 理论上,体素是复制现实的完美建模技术。 这里我们要了解四个广泛流行的 Python 库(Open3D、Trimesh、PyVista、pyntcloud )生成点云…
PCL - ICP代碼研讀(二三 ) - ConvergenceCriteria架構
PCL - ICP代碼研讀(二三 ) - ConvergenceCriteria架構前言ConvergenceCriteriausingconstructor和destructor收斂判斷函數前言
ConvergenceCriteria是一個抽象類別,提供了hasConverged介面,用於判斷當前點雲校正算法是否收斂。
…
PCL - MLS代碼研讀(三)- 坐標計算函數
PCL - MLS代碼研讀(三)- 坐標計算函數前言三維getMLSCoordinates二維getMLSCoordinatesgetPolynomialValue前言
本篇延續PCL - MLS代碼研讀(二),繼續介紹坐標計算函數。
三維getMLSCoordinates
此函數計算全局坐標系…
PCL - ICP代碼研讀(一) - 整體架構
PCL - ICP代碼研讀(一) - 整體架構如ICP(Iterative Closest Point)算法推導中描述的ICP算法,可以分為以下三步:
尋找兩點雲間的配對估計轉換矩陣判斷收斂與否
在PCL這個庫中,整個校正過程所涉…
PCL - ICP代碼研讀(十五 ) - CorrespondenceEstimation實現
PCL - ICP代碼研讀(十五 ) - CorrespondenceEstimation實現前言CorrespondenceEstimationdetermineCorrespondences函數determineReciprocalCorrespondences函數前言
接續PCL - ICP代碼研讀(十四 ) - CorrespondenceEstimation架…
PCL - ICP代碼研讀(二六) - TransformationEstimationPointToPlaneLLS架構
PCL - ICP代碼研讀(二六) - TransformationEstimationPointToPlaneLLS架構前言TransformationEstimationPointToPlaneLLSusingconstructor和destructor估計剛體變換的函數constructTransformationMatrix前言
ICP的變種Point-To-Plane相較於經典款的ICP&…
PCL - ICP代碼研讀(十三 ) - CorrespondenceEstimationBase實現
PCL - ICP代碼研讀(十三 ) - CorrespondenceEstimationBase實現前言CorrespondenceEstimationBasesetInputTarget函數initCompute函數initComputeReciprocal函數前言
從PCL - ICP代碼研讀(十二 ) - CorrespondenceEstimationBase…
PCL - MLS代碼研讀(八)- MovingLeastSquares
PCL - MLS代碼研讀(八)- MovingLeastSquares前言pcl::MovingLeastSquaresUpsamplingMethodMLSVoxelGridtypedefusingprotected成員變量public成員函數constructor和destructorgetter和setterprocessprotected成員函數private成員前言
本篇介紹MLS的第二…
【点云】生成有凹凸的平面
文章目录 前言高斯函数原理代码保存 测试测试1 :领域曲率代码测试2:高斯曲率代码 加上噪点测试1测试2改进 前言
尝试用一些数据生成有凹凸面的点云。 我们姑且把z轴当成有凹凸的缺陷,x轴和y轴共同组成一个平面。 高斯函数
原理
高斯函数wi…

3D目标检测数据集 DAIR-V2X-V
本文分享国内场景3D目标检测,公开数据集 DAIR-V2X-V(也称为DAIR-V2X车端)。DAIR-V2X车端3D检测数据集是一个大规模车端多模态数据集,包括: 22325帧 图像数据22325帧 点云数据2D&3D标注 基于该数据集,可…
点云 ros PointCloud2格式与livox CustomMsg格式介绍
点云 ros PointCloud2格式与livox CustomMsg格式介绍 PointCloud2 点云格式livox CustomMsg 点云格式 PointCloud2 点云格式
PointCloud2 是ros的一种点云格式
具体官方数据 http://docs.ros.org/en/jade/api/sensor_msgs/html/msg/PointCloud2.html
std_msgs/Header header…
德国大陆博世 ars 548 4D 毫米波雷达 window 系统或者 Ubuntu 系统通讯以及数据解析和显示程序
德国大陆博世 ars 548 4D 毫米波雷达 window 系统或者 Ubuntu ROS 系统通讯以及数据解析和显示程序
PCL - ICP代碼研讀(十八 ) - DataContainerInterface和DataContainer
PCL - ICP代碼研讀(十八 ) - DataContainerInterface和DataContainer前言DataContainerInterfaceusingdestructor計算配對分數的介面DataContainerusingconstructor和destructor點雲的setter和gettertarget點雲搜索方法setter法向量setter和getter配對分…
PCL - ICP代碼研讀(十一 ) - Correspondence實現
PCL - ICP代碼研讀(十一 ) - Correspondence實現前言getRejectedQueryIndices<< 運算子前言
接續PCL - ICP代碼研讀(十 ) - Correspondence架構,本篇繼續來看Correspondence各函數的實現,本片對應到…
ICP(Iterative Closest Point)算法推導
ICP(Iterative Closest Point)算法推導前言算法流程損失函數求解t化簡令導數為0求解R回代t將f轉化為x^2^y^2^-2xy的形式化簡並引入去除均值的點雲SVD矩陣分解尋找最優的R前言
本篇整理自深藍學院三維點雲處理課程的Lecture 9 – Registration。推導過程…
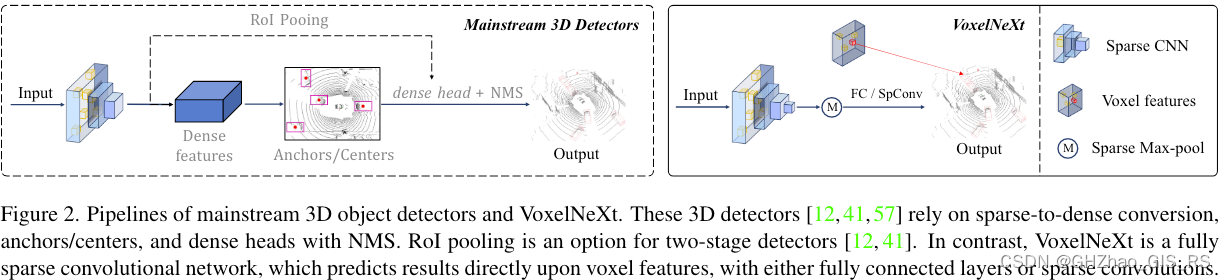
3D点云目标检测:VoxelNex解读(带源码/未完)
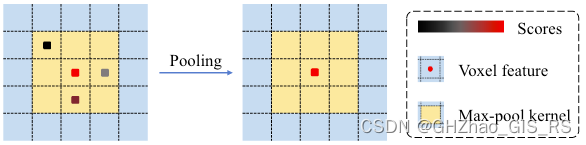
VoxelNext 通用vsVoxelNext一、3D稀疏卷积模块1.1、额外的两次下采样1.2、稀疏体素删减 二、高度压缩三、稀疏池化四、head五、waymo数据集训练六、训练自己的数据集bug修改 通用vsVoxelNext 一、3D稀疏卷积模块
1.1、额外的两次下采样
使用通用的3D sparse conv,…
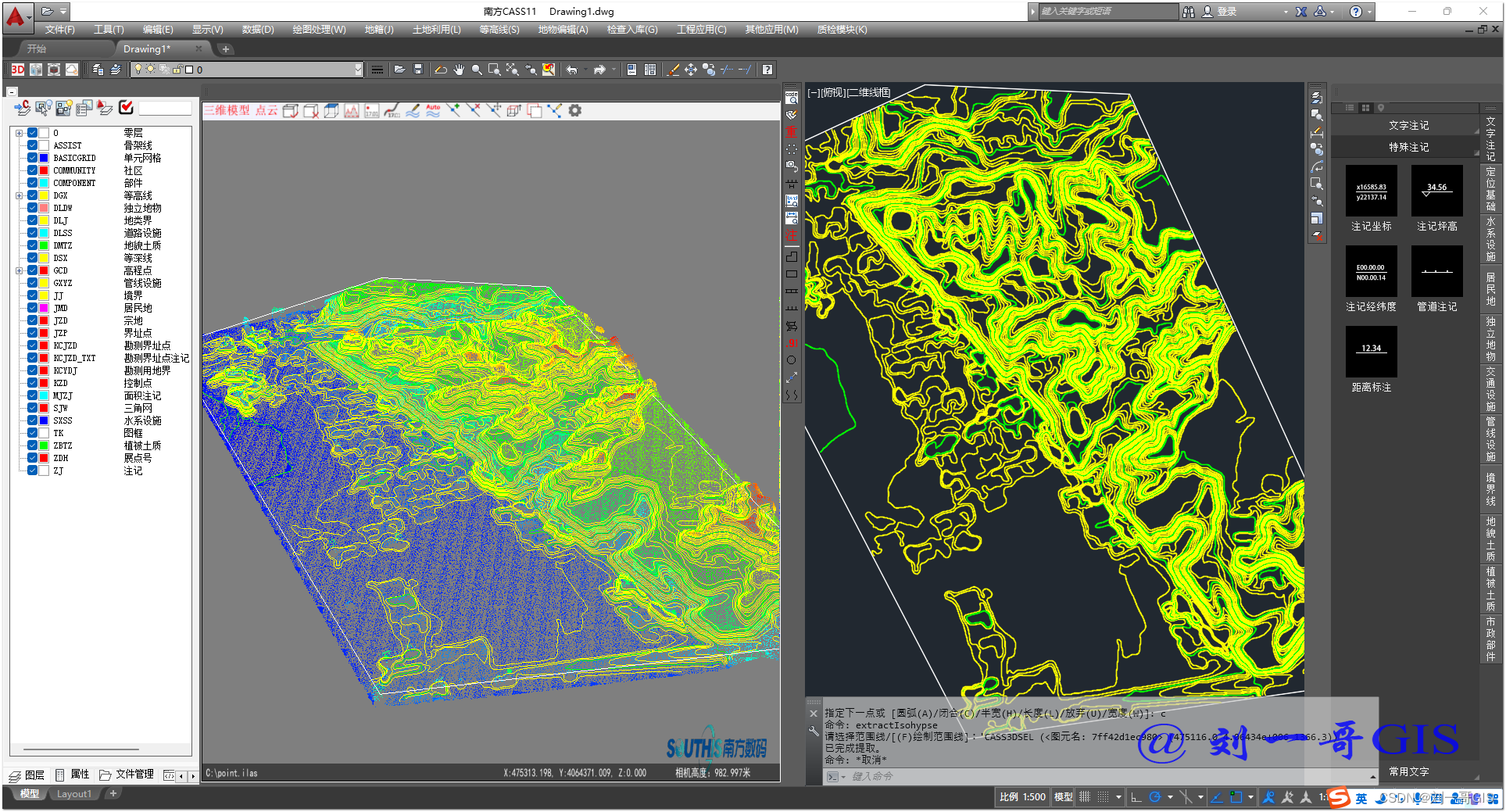
【CASS精品教程】cass3d加载点云(.ilas和.las)并处理应用
本文讲解cass11.0 3d中将las点云转为ilas加载并进行后续处理。(cass11.0下载与安装) 一、ilas点云格式介绍
点云ilas格式是现今数字化三维模型建模的--种普遍被使用的数据格式,也被称作点云、点集或聚集点。它把地球表面上的物体,比如森林、海洋、河流、山脉等自然物体,以…
python三维点云投影(二)
python点云投影样例,投影知识和理论分析见:三维点云投影(一)_Coding的叶子的博客-CSDN博客。
数据来源:modelnet40点云样例数据-深度学习文档类资源-CSDN下载。
一、python代码
# -*- coding: utf-8 -*-
"&quo…
PCL - ICP代碼研讀(二 ) - Registration架構
PCL - ICP代碼研讀(二 ) - Registration架構前言usingpublic函數constructor和destructorsetter和getterregisterVisualizationCallbackgetFitnessScorehasConvergedaligngetClassNameinitCompute和initComputeReciprocalCorrespondenceRejector相關函數…
PCL - ICP代碼研讀(四 ) - getFitnessScore函數
PCL - ICP代碼研讀(四 ) - getFitnessScore函數前言getFitnessScore - for two vectorsgetFitnessScore - for two point clouds前言
接續PCL - ICP代碼研讀(三 ) - Registration初始化,本篇主要介紹Registration類別…
PCL - MLS代碼研讀(七)- 曲面擬合函數
PCL - MLS代碼研讀(七)- 曲面擬合函數computeMLSSurface宣告兩個變數計算鄰域內所有點的重心計算平面參數model_coefficients被投影點query_point檢查eigen_vector合理性計算局部坐標系原點計算曲率計算局部坐標系的三個軸向設定三個變數權重函數宣告四個…
处理点云数据(四):点云到图像平面的投影
点云到图像平面的投影
坐标系的定义
相机(x:右,y:下,z:前) 点云(x:前,y:左,z:上)
读取传感器校准参数
在…
点云离群点剔除 — open3d python
离群点一般是指偏离大部分数据的点,可能是由于随机误差造成异常点。离群点剔除的方法有很多种,例如基于统计、邻近度、密度、方差等方法。这里主要介绍open3d中实现的三种点云离群点的剔除方法,包括无效值剔除、统计方法、半径滤波法。
1 无…

点云旋转平移(三)—python open3d点云旋转
点云旋转平移介绍,请参考上一节:点云旋转平移(一)—基础知识介绍_Coding的叶子的博客-CSDN博客。
本节所使用的示例pcd点云文件请参考:pcd格式点云样例文件-深度学习文档类资源-CSDN下载。
1 python open3d点云旋转函…

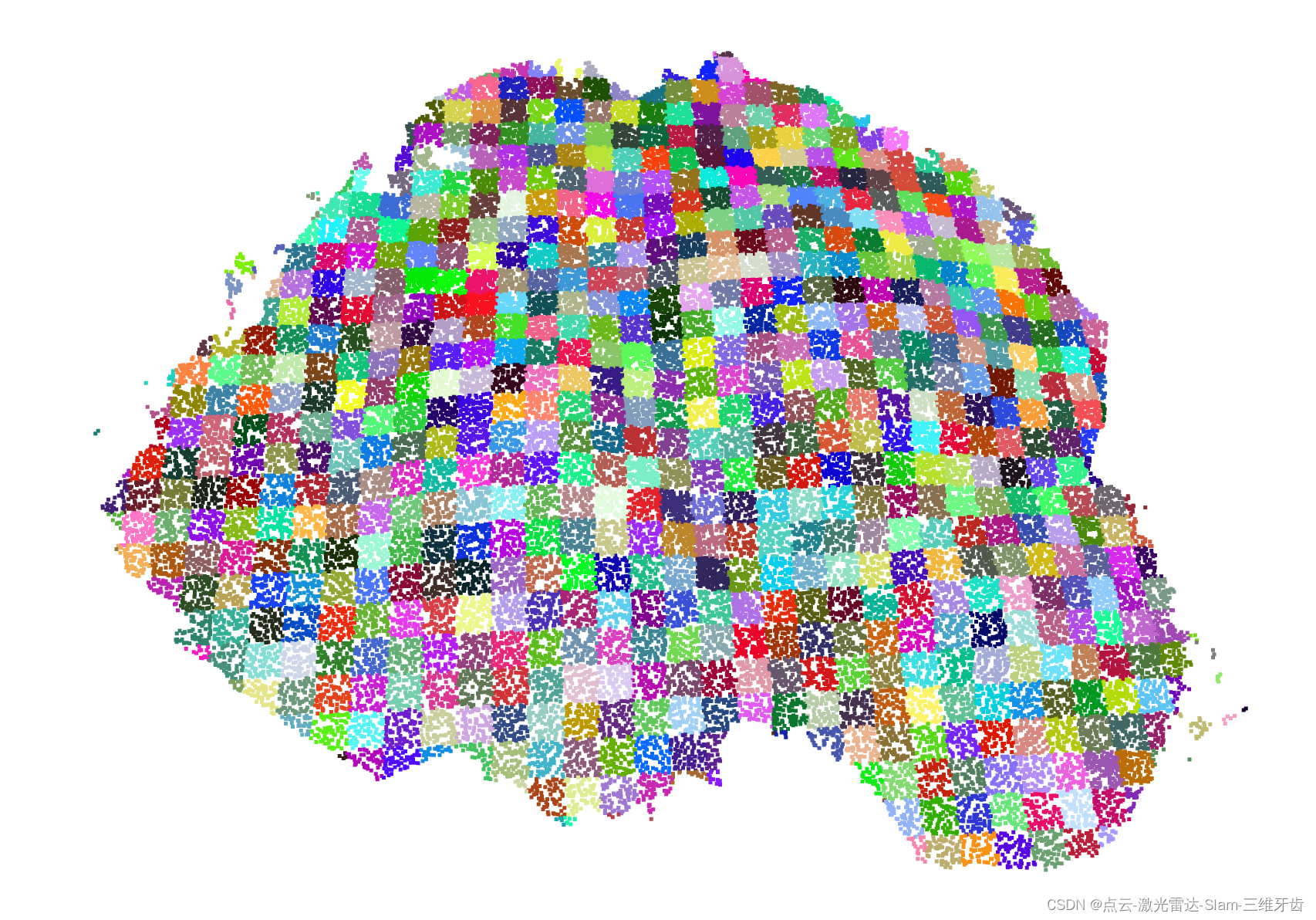
点云处理【六】(点云分割)
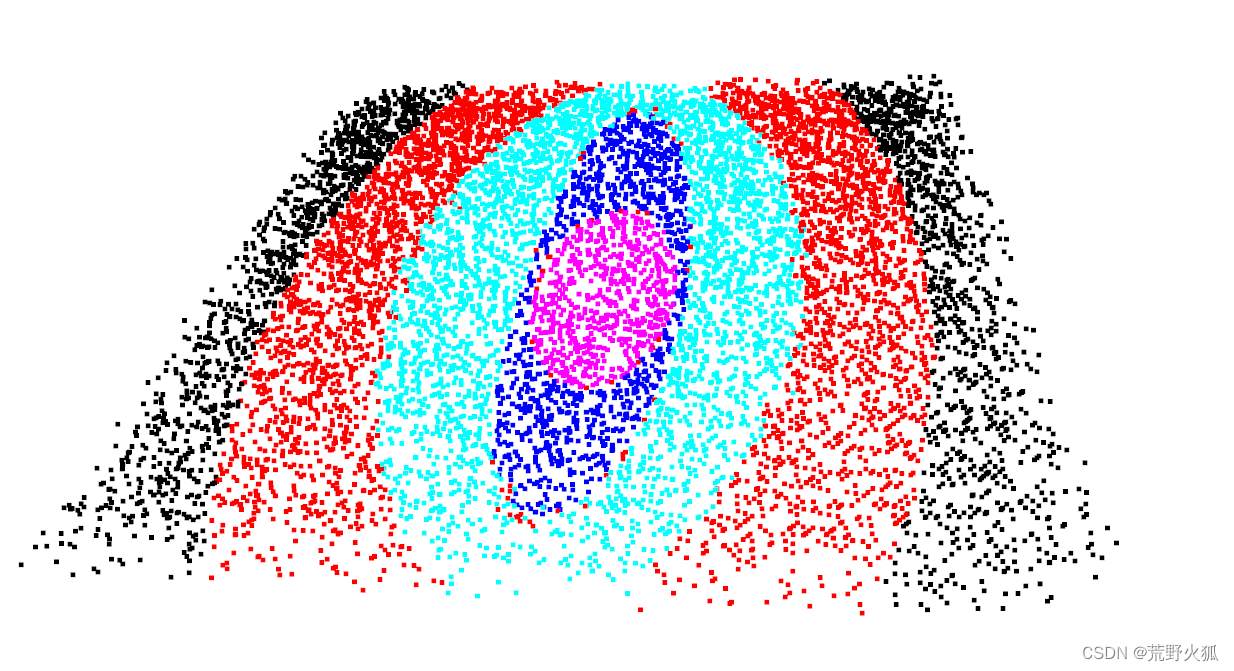
点云分割
第一章 点云数据采集 1. 点云分割
点云数据中包含目标物体,点云分割算法即将物体分割出来。
2 分割算法
2.1 RANSAC(随机采样一致性)方法
基于随机采样一致性的分割的步骤如下: 1.从一个样本集S中,随机抽取n个样本,…
处理点云数据(二):点云与生成前视图
创建点云数据中的前视图
前视图投影
为了将激光雷达传感器的前视图平面化为二维图像,必须将三维空间中的点投影到可以展开的圆柱形表面上,以将其平面化。下面公式见论文Vehicle Detection from 3D Lidar Using Fully Convolutional Network
# h_res …

点云平面拟合新国标怎么应对?
文章目录 一、应用背景二、算法原理三、代码实现首先我们看一下平面度的概念: 平面度:测量点集合中,在平面上方且距离基准平面最远的点到平面的距离+在平面下方且距离基准平面最远的点到平面的距离。 一、应用背景
在旧标准中,使用最小二乘法去拟合全部点,以拟合平面作为…
pts 点云文件格式 最简便的点云格式
保存点云最快捷的方式
直接按X Y Z顺序存储点云数据, 可以整型可以浮点型。
以ASCII码方式储存,之间用SPACE间隔。 举个例子
立方体
0 0 0 0 0 1 0 1 1 0 1 0 1 0 0 1 0 1 1 1 1 1 1 0 以下是塑像点云
0.780933 -45.9836 -2.47675 4.75189 -38.15…
Linux Ubuntu 和 Mac ,Windows 部署离线通义千问1.8B参数 4-bit量化大模型详细教程 全网唯一
代码为我自己写的 python 程序,应该是全网最简单的大模型部署方案,一个模型文件1.3GB,一个python代码即可开始玩耍~ 首先说明,本文下面的内容需要一点点python基础,需要会安装 python和 pip 安装依赖库,如果你不会或者不想这么麻烦,只想要下载就能马上使用的大模型离线整…
PCL - MLS代碼研讀(五)- 曲率計算函數
PCL - MLS代碼研讀(五)- 曲率計算函數前言calculatePrincipalCurvatures參考連結前言
本篇延續PCL - MLS代碼研讀(二),繼續介紹曲率計算函數。
calculatePrincipalCurvatures
Eigen::Vector2f
pcl::MLSResult::calc…
PCL - MLS代碼研讀(十一)- computeMLSPointNormal函數
PCL - MLS代碼研讀(十一)- computeMLSPointNormal函數前言computeMLSPointNormal前言
在PCL - MLS代碼研讀(十)- performProcessing函數中,看到了performProcessing函數調用computeMLSPointNormal函數做計算ÿ…
三维点云质心与三角化 — python open3d
1 质心介绍 质心概念与重心的计算方式相同。如下所示: (1) 即 (2) 乘积mr相当于一个力矩,当作用点为质心时,总的力矩等于零。以杠杆或者天平来说,力矩为零的情况就是总体达…
为什么Open3D可视化TensorFlow张量速度超慢
问题描述
在使用Open3D可视化TensorFlow张量表示的点云时速度超慢
原因分析
可能是因为Open3D没有针对tf.Tensor做优化,也可能是tf.Tensor本身没有对张量的操作做优化,所以可能如果要在CPU中计算,numpy可能性能更好。
解决方案
open3d.u…
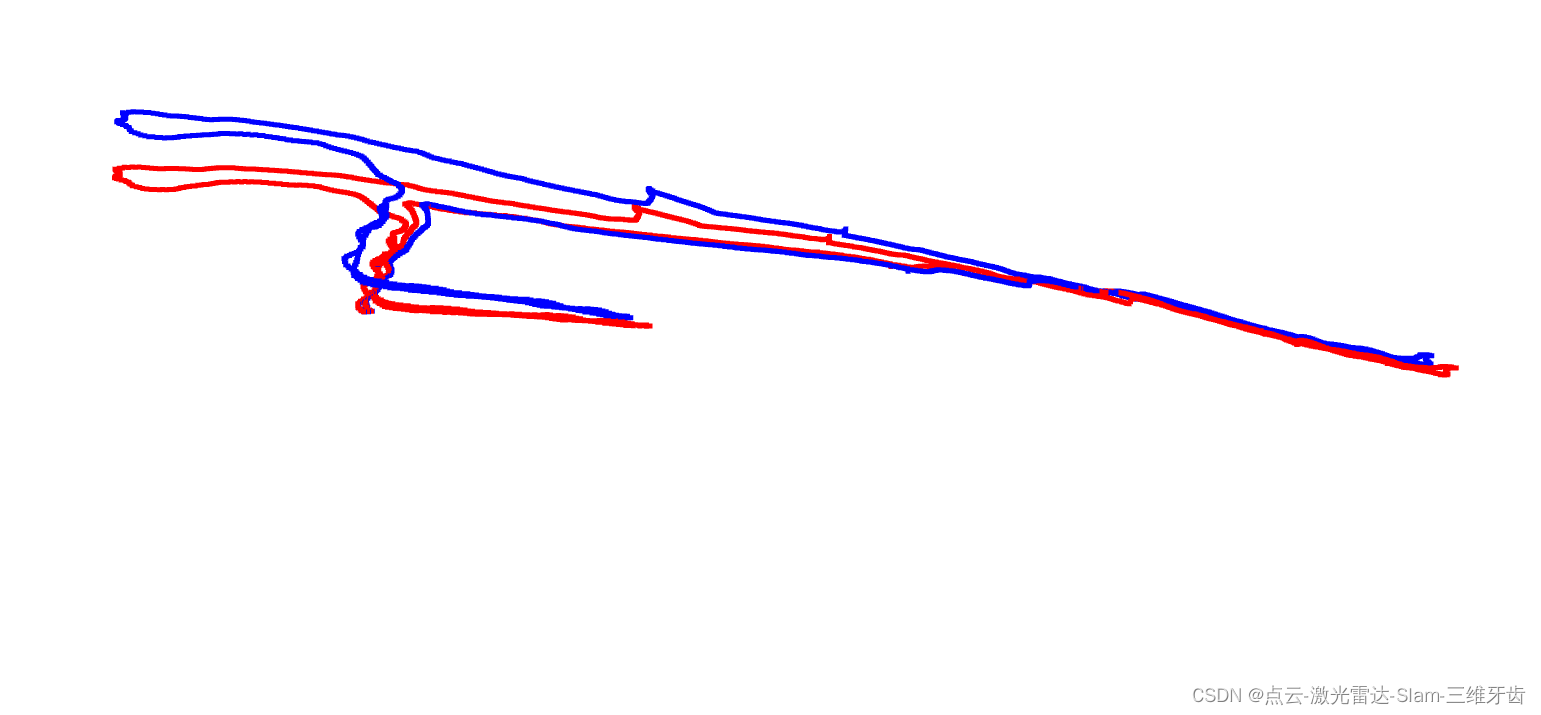
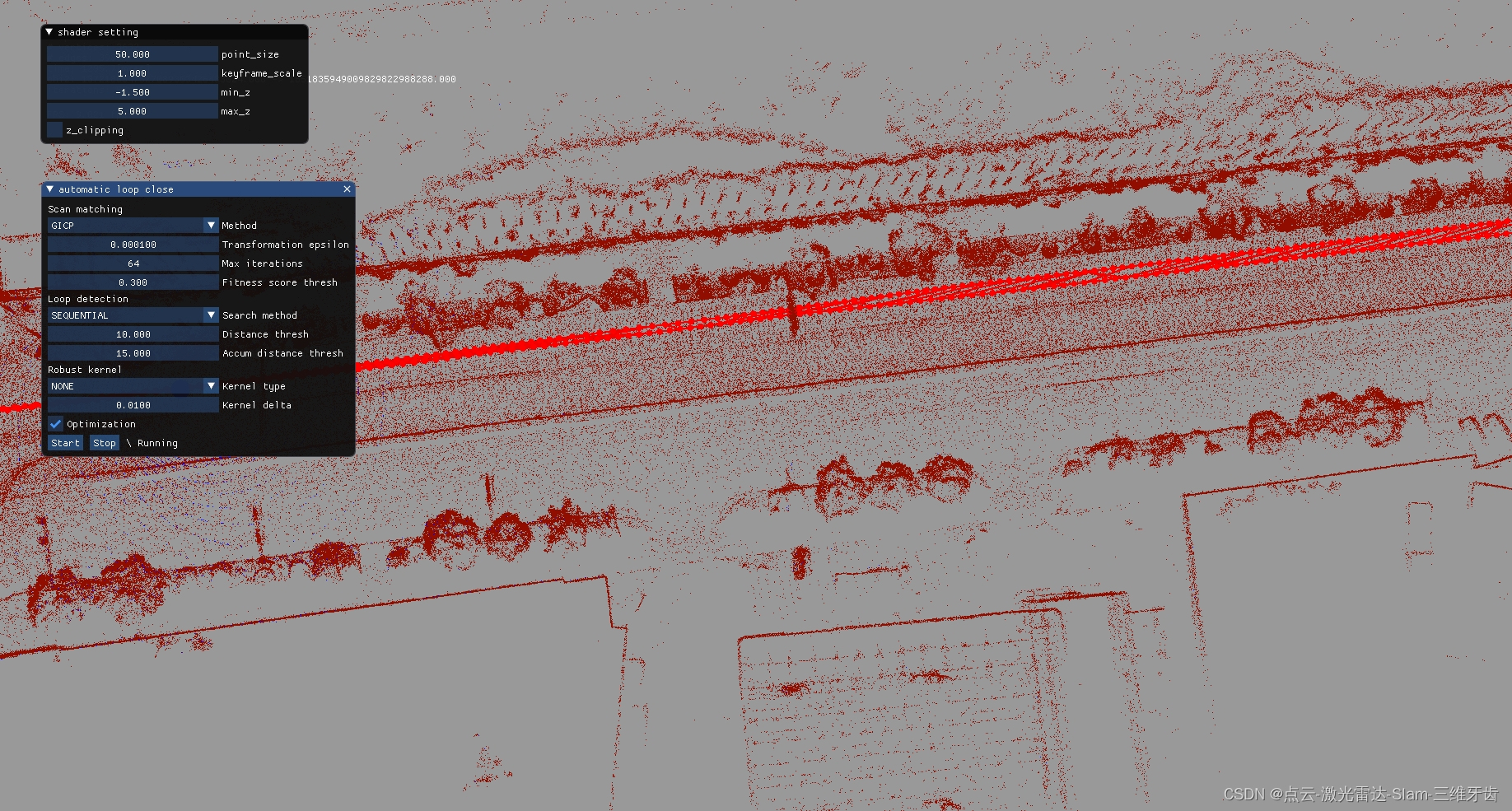
在window系统用 python 做slam回环检测和图优化位姿(附代码思路)
因为 fast lio 没有回环模块,现有的添加回环的一些 github 项目工程又各自有各自的问题,所以我把它每个节点的点云数据和位姿信息保存了下来,自己做一个单独的回环图优化模块,和 LIO 激光里程计模块完全解耦,并且要足够…
3D点云目标检测:VoxelNex解读
VoxelNext 通用检测器 vs VoxelNext一、3D稀疏卷积模块1.1、额外的两次下采样消融实验结果代码 1.2、稀疏体素删减消融实验:代码 二、稀疏体素高度压缩代码 三、稀疏预测head 通用检测器 vs VoxelNext 一、3D稀疏卷积模块
1.1、额外的两次下采样
使用通用的3D spa…

PCL - MLS代碼研讀(十五)- VOXEL_GRID_DILATION上採樣方法
PCL - MLS代碼研讀(十五)- VOXEL_GRID_DILATION上採樣方法前言成員變數MLSVoxelGridMLSVoxelGrid建構子dilate函數getter & setterprocess函數performUpsampling函數上採樣結果前言
PCL - MLS代碼研讀(十一)- computeMLSPoin…
PCL点云处理之Pcd文件读取、法线与曲率计算、多线程加速、属性字段合并 (二百零八)
PCL点云处理之Pcd文件读取、法线与曲率计算、多线程加速、属性字段合并(二百零八) 一、相关介绍二、算法实现1.代码一、相关介绍
(夜深人不静) 法线和曲率的计算是点云处理中常用的关键特征,PCL提供了特有的点类型PointNormal来记录这些信息,通过OMP多线程对相关的计算函…
PCL - ICP代碼研讀(五 ) - align函數
PCL - ICP代碼研讀(五 ) - align函數前言alignalign wrapper前言
接續PCL - ICP代碼研讀(二 ) - Registration架構,本篇主要介紹Registration類別的align函數。
computeTransformation這個純虛擬函數用於估計兩點雲間…
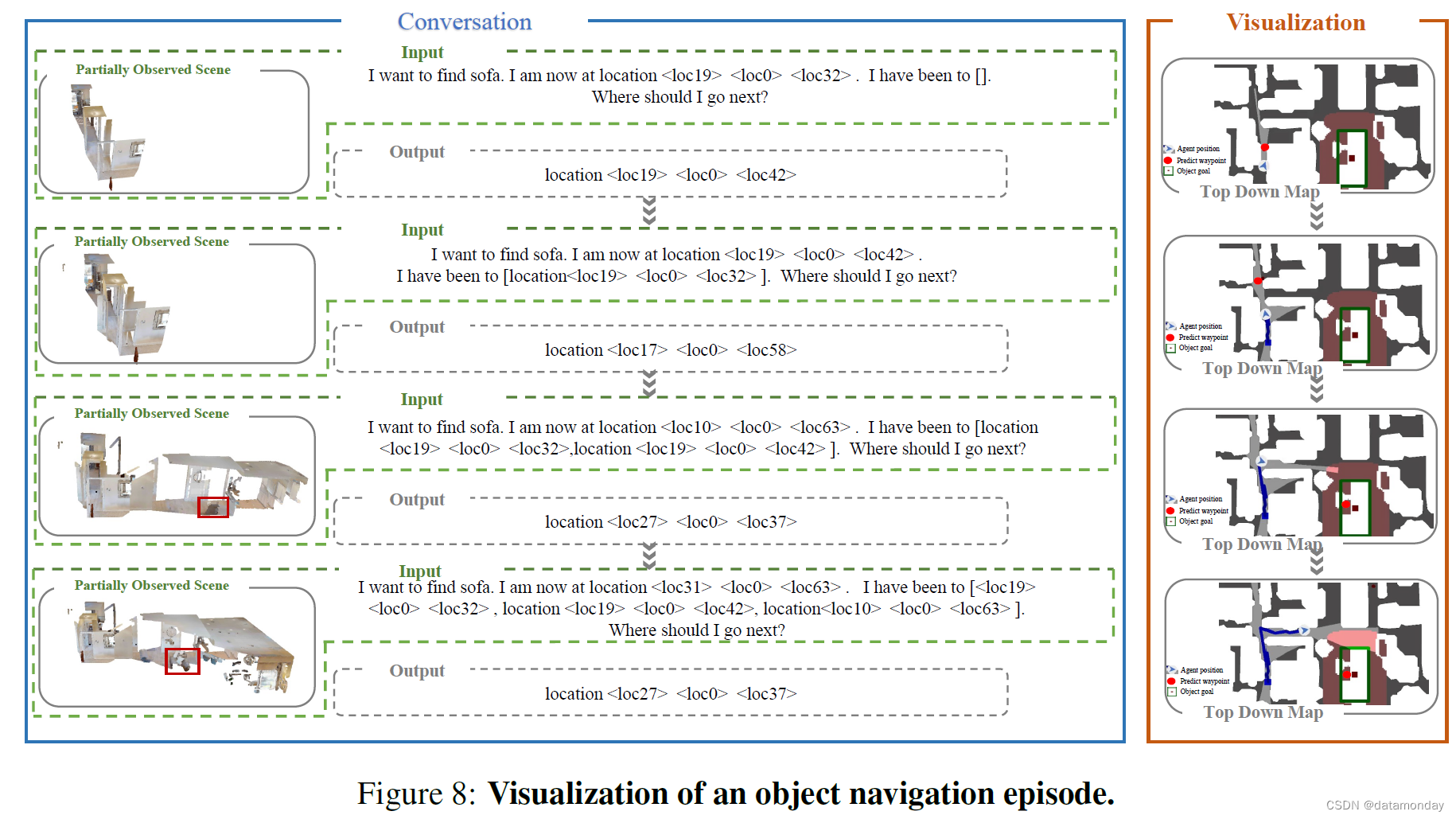
【LMM 016】3D-LLM:将 3D 点云特征注入 LLM
论文标题:3D-LLM: Injecting the 3D World into Large Language Models 论文作者:Yining Hong, Haoyu Zhen, Peihao Chen, Shuhong Zheng, Yilun Du, Zhenfang Chen, Chuang Gan 作者单位:University of California, Los Angeles, Shanghai J…
Python点云处理(二十)点云轮廓边界提取——基于邻域三角形距离算法
目录 0 简述1 点云轮廓提取原理2 点云轮廓提取应用3 算法步骤4 代码实现5 结果展示0 简述
点云轮廓提取/边界提取,对于扫描物信息化提取、矢量化等都具有很重要的意义。扫描物体轮廓不仅包含位置和形状信息,而且可作为一种先验形状信息推断其结构以辅助三维模型重建,因此轮…
处理点云数据(三):三维点云可视化
三维可视化点云
使用Mayavi可视化
首先使用anaconda安装mayavi,打开命令行界面
conda install mayavi
如果python版本是py3则会出错,需要安装python2.7版本:
conda create -n py2 python2
然后在py2的环境下安装mayavi:
co…
PCL - ICP代碼研讀(二四 ) - DefaultConvergenceCriteria架構
PCL - ICP代碼研讀(二四 ) - DefaultConvergenceCriteria架構前言DefaultConvergenceCriteriausing收斂狀態constructor和destructorgetter和settercalculateMSEprotected成員變數前言
DefaultConvergenceCriteria顧名思義,也就是預設的收斂…
python三维点云投影(一)
一、立体几何基础知识
1.1 平面表示 三维平面的统一表示方法:
1.2 法向量 假设(x1, y1, z1)、(x2,y2,z2)为平面上两个点,那么可以得到: (x2-x1, y2-y1, z2-z1)是平面上…
Open3d读写ply点云文件
1 Open3d 安装 Open3d是由Intel发布的一个开源库,支持快速开发和处理3D数据。Open3D在c和Python中公开了一组精心选择的数据结构和算法。后端是高度优化的,并且是为并行化而设置的。 Open3d直接使用pip安装即可。解决下载慢的问题,请切换下载…
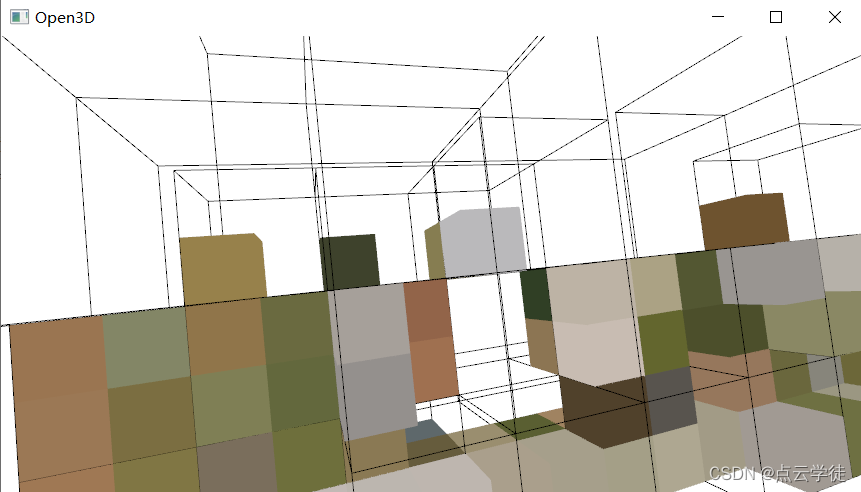
Open3D 从体素网格构建八叉树(14)
Open3D 从体素网格构建八叉树(14) 一、算法简介二、算法实现1.代码2.效果一、算法简介
上一章介绍从点云构建八叉树,对点云所在体素进行了可视化显示,这里可以对体素构建八叉树,可视化显示八叉树的具体划分结构。
二、算法实现
1.代码
代码如下(示例):
import op…
点云配准(一)— ICP方法
点云配准本质上是将点云从一个坐标系变换到另一个坐标系。 点云配准通常会需要用到两个点云数据。第一类点云数据称为原始点云,用S(source)来表示。第二类点云数据称为目标点云,用T(Target)来表示。 点云配…
PCL - ICP代碼研讀(十二 ) - CorrespondenceEstimationBase架構
PCL - ICP代碼研讀(十二 ) - CorrespondenceEstimationBase架構前言CorrespondenceEstimationBaseusingconstructor和destructor點雲的setter和getter法向量相關函數索引的setter和getter最近鄰查找相關函數估計點對的函數point_representation_的setter…
Open3D库进行点云的RANSAC平面分割和可视化 c++ 代码
使用Open3D库进行点云的RANSAC平面分割和可视化。 引入必要的头文件和命名空间: main函数: 读取点云数据文件到cloud对象。如果读取失败,则输出警告信息并返回。输出点云中的点数。定义可视化窗口的宽度和高度。使用Open3D的可视化功能,绘制原始点云,并显示在窗口中。定义…
点云从入门到精通技术详解100篇-基于三维点云的机器人抓取位姿检测(续)
目录
3.2 目标点云的预处理
3.2.1 直通滤波
3.2.2 体素降采样
3.2.3 剔除支撑平面
3.2.4 剔除离群点
PCL - ICP代碼研讀(十 ) - Correspondence架構
PCL - ICP代碼研讀(十 ) - Correspondence架構前言Correspondence前言
Correspondence結構體表示兩點雲間的一組配對,它的架構主要寫在correspondence.h中。
Correspondence
必要的include:
#pragma once#ifdef __GNUC__
#pra…
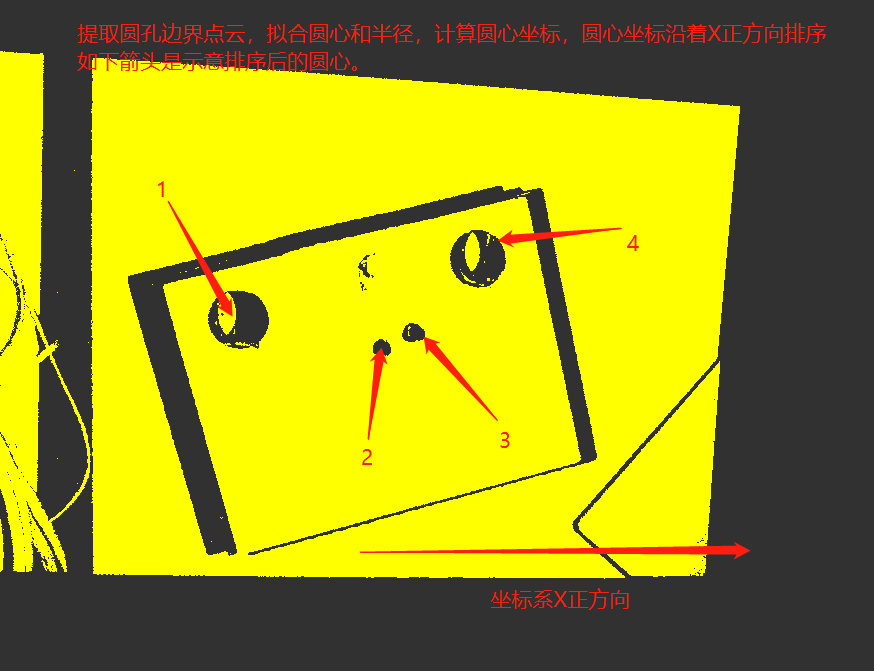
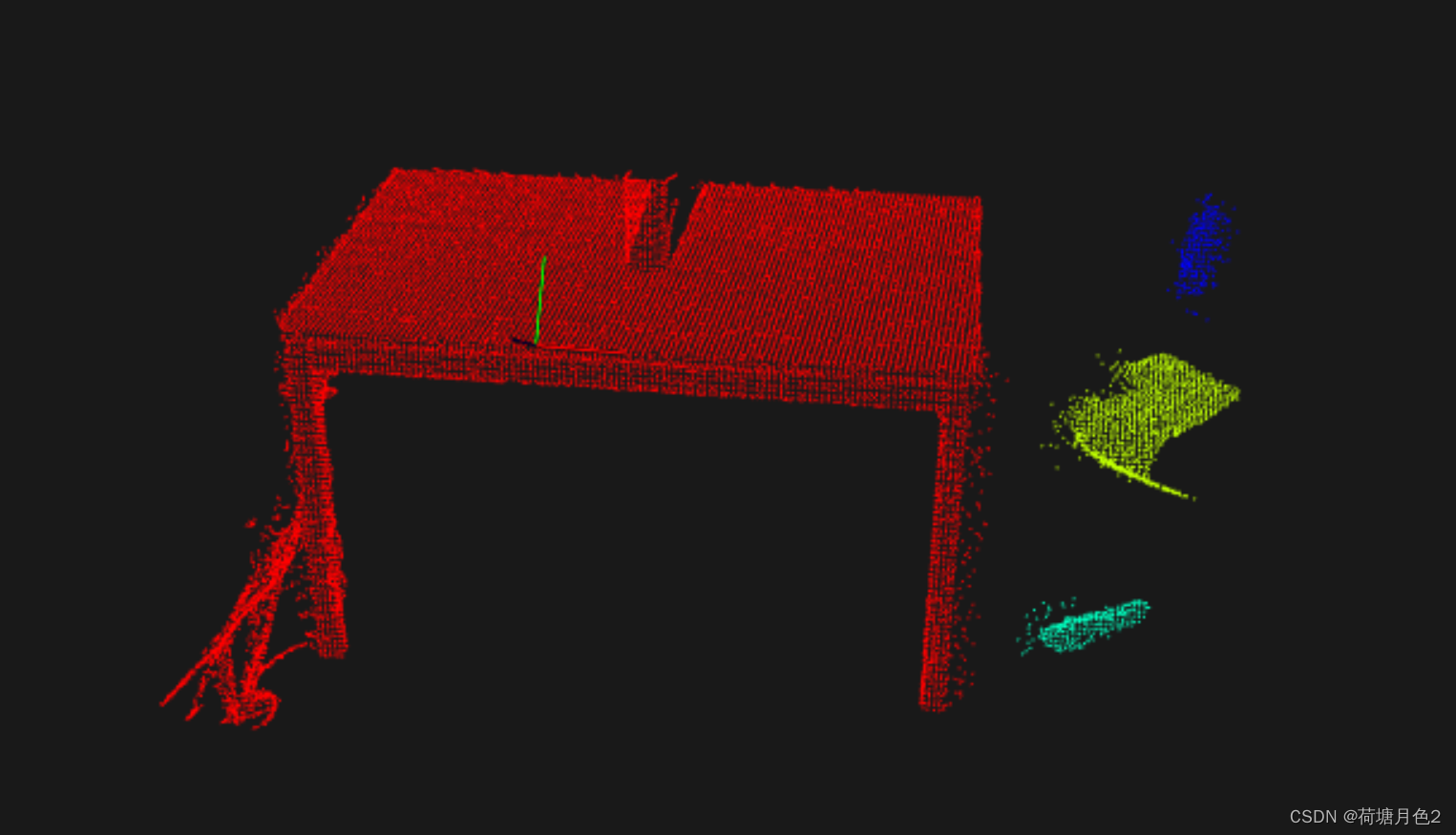
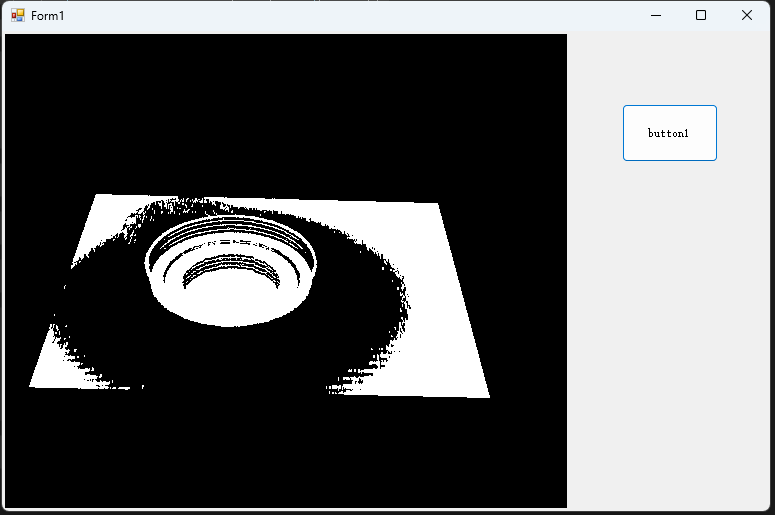
点云处理开发测试题目 完整解决方案
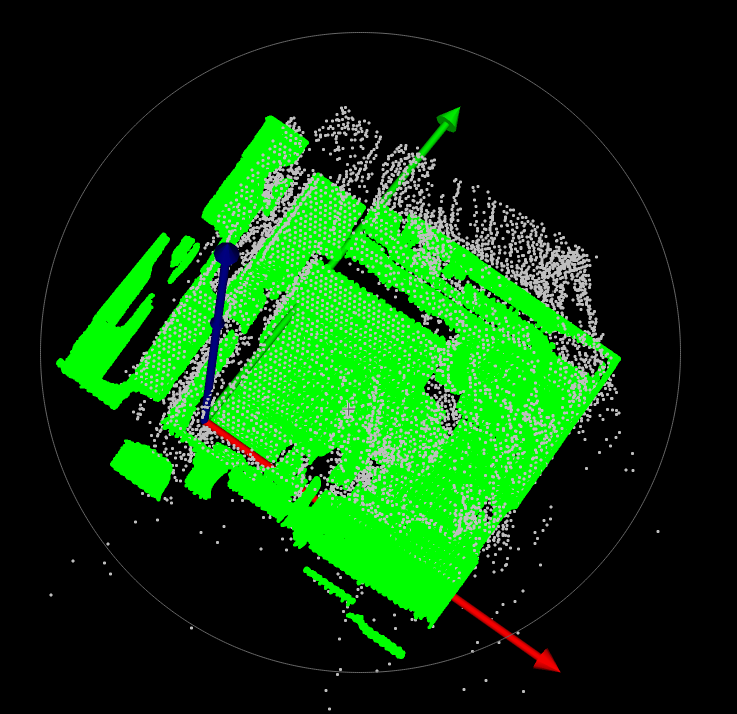
点云处理开发测试题目 文件夹中有一个场景的三块点云数据,单位mm。是一个桌子上放了一个纸箱,纸箱上有四个圆孔。需要做的内容是:
1. 绘制出最小外接立方体,得到纸箱的长宽高值。注意高度计算是纸箱平面到桌子平面的距离。 2. 计算出纸箱上的四个圆的圆心坐标和半径,对圆…
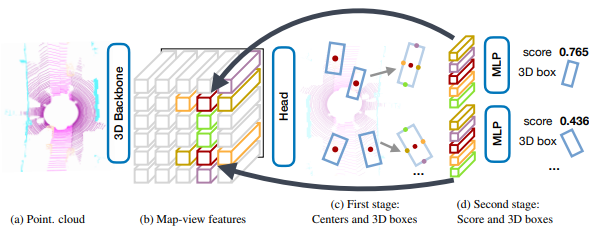
【三维目标检测】CenterPoint(一)
CenterPoint是一种anchor free的三维目标检测算法模型,发表在CVPR 2021,论文名称为《Center-based 3D Object Detection and Tracking》。其主要特点在于通过预测物体的中心点来进行目标检测和位置回归,而不需要预先产生大量候选框࿰…
【CloudCompare教程】017:点云快速全局配准
点云数据的配准分为基于特征(特征点、特征线)的拼接和无特征拼接。 特征点匹配的方法和全局ICP的方法。特征点的方法通过全局特征匹配达到全局配准,全局ICP的方法通过对变量空间进行搜索的方法达到全局最优解。 文章目录 一、点云配准概述1. 定义2. 分类二、加载点云数据三、…
PCL - ICP代碼研讀(二五 ) - DefaultConvergenceCriteria實現
PCL - ICP代碼研讀(二五 ) - DefaultConvergenceCriteria實現前言DefaultConvergenceCriteria前言
接續PCL - ICP代碼研讀(二四 ) - DefaultConvergenceCriteria架構,本篇繼續介紹DefaultConvergenceCriteria中hasCon…
PCL - ICP代碼研讀(二一 ) - TransformationEstimationSVD架構
PCL - ICP代碼研讀(二一 ) - TransformationEstimationSVD架構前言TransformationEstimationSVDusingconstructor和destructor估計剛體變換的函數getTransformationFromCorrelationprotected成員變數前言
TransformationEstimationSVD是TransformationE…
点云缩放—python open3d
1 点云缩放 点云缩放是指尺度按比例缩放一定的倍数,点云数量保持不变。点云缩放的方法主要有numpy数组法、open3d缩放函数、open3d投影变换函数。 2 numpy 数组方法 通过将点云数组乘以一个缩放因子来改变大小,同时通过加法运算实现质心平移。
points …
点云仿射变换—open3d python
1 点云仿射变换 对于点云来说,仿射变换是将点云中的点按照同一规则变换。仿射变换包含了一组线性变换和一个平移变换。其中,线性变换可以用矩阵左乘来表示。因此,仿射变换可以用矩阵和向量的方式来表达。 (1)
即&…
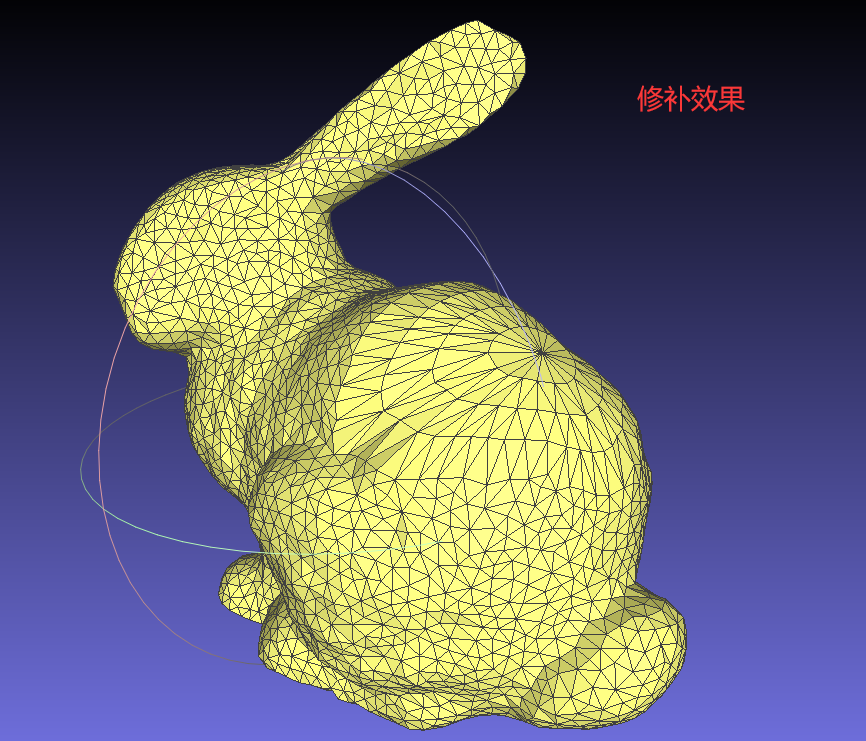
OFF点云孔洞修补(代码实测可运行)
使用变分微积分和曲面整流罩平滑填充 3D 网格中的孔,这里使用的数据是off 网格面片数据,点云PCD数据需要另外处理 解析命令行参数: 代码首先通过解析命令行参数获取输入文件名(inFile)、输出文件名(outFile)、输出面数(outFacesN)和上采样级别(upsampleN)。如果未提…
点云从入门到精通技术详解100篇-基于 3D 视觉信息的机械手抓取机械零部件(续)
目录 3.2 一对点云的快速全局配准 3.2.1 构建目标函数 3.2.2 构建对应关系 3.2.3 联合目标函数优化
PCL - ICP代碼研讀(九 ) - computeTransform函數
PCL - ICP代碼研讀(九 ) - computeTransform函數前言computeTransform前言
computeTransform函數實現了ICP算法,是icp.hpp的精髓所在。
回顧ICP(Iterative Closest Point)算法推導中提到的ICP算法三步驟,…
PCL - ICP代碼研讀(二十 ) - TransformationEstimation剛體變換估計
PCL - ICP代碼研讀(二十 ) - TransformationEstimation剛體變換估計前言TransformationEstimationusingconstructor和destructor估計剛體變換的函數前言
TransformationEstimation是一個抽象類別,提供了多個用於估計剛體變換的介面。
本篇對…
matlab 实现点云ICP 配准算法
一、算法步骤 (1)在目标点云P中取点集pi∈P; (2)找出源点云Q中的对应点集qi∈Q,使得||qi-pi||=min; (3)计算旋转矩阵R和平移矩阵t,使得误差函数最小; (4)对pi使用上一步求得的旋转矩阵R和平移矩阵t进行旋转和平移变换,的到新的对应点集pi’={pi’=Rpi+t,pi∈P};…
solana基础python交互——生成私钥与转账sol
代码包含了两个部分,分别是生成Keypair和进行Solana区块链上的转账操作。以下是对代码的解释: 生成Keypair: 导入Keypair类:代码中使用了solders库中的Keypair类。循环生成Keypair:通过循环100次,每次生成一个新的Keypair对象,并打印出生成的Keypair和对应的公钥(pubkey…

【Recap教程】autodesk recap软件的安装、认识与使用
一、autodesk recap概述
1. recap介绍
Autodesk Recap是一款由Autodesk公司推出的三维扫描软件,它能够转换多种数据源(如点云、激光雷达、照片)为可视的三维模型。该软件的使用使得用户可以更容易地生成高质量、完整的三维模型。Autodesk Recap通常用于建筑、土木工程、汽…
三种点云下采样方法(二)— open3d python
点云下采样是对点云以一定的采样规则重新进行采样,目的是在保证点云整体几何特征不变的情况下,降低点云的密度,进而可以降低相关处理的数据量和算法复杂度。上一节介绍了体素下采样的方法https://blog.csdn.net/suiyingy/article/details/124…

点云格式-PCD格式介绍
PCD格式介绍 一、概述二、PCD 版本三、文件格式头信息四、数据存储格式类型五、优于其他文件格式的优点六、例子 一、概述 PCD文件格式是PCL库最常用的一种数据格式、也是其提供的一个独有的数据格式,PCD文件格式并不是要重新发明轮子,而是为了补充现有的…
PCL Harris关键点提取
文章目录 一、简介二、PCL中的Harris二、实现代码三、实现效果参考资料一、简介 Harris关键点检测于1988年Chair Harris和Mike Stephens提出,是早期非常经典的一种关键点检测算法。在二维图像中,Harris关键点检测通过计算图像点的Harris矩阵和矩阵对应的特征值来判断是否为关…
【点云格式互转】ply转bin、任意点云格式转ply
3D点云存储方式的种类较多,包括pcd、ply、txt、bin、obj等格式,各种点云格式的详细介绍请参考之前的博客:点云格式介绍(更新中,待补充)_Coding的叶子的博客-CSDN博客_txt点云格式。本节主要介绍ply格式转bi…

PCL - MLS代碼研讀(十三)- RANDOM_UNIFORM_DENSITY上採樣方法
PCL - MLS代碼研讀(十三)- RANDOM_UNIFORM_DENSITY上採樣方法
前言
在PCL - MLS代碼研讀(十一)- computeMLSPointNormal函數中已經介紹了NONE和SAMPLE_LOCAL_PLANE上採樣方法。本篇主要介紹之前略過的RANDOM_UNIFORM_DENSITY上採…
PCL - MLS代碼研讀(二)- MLSResult
PCL - MLS代碼研讀(二)- MLSResult前言pcl::MLSResultProjectionMethodPolynomialPartialDerivativeMLSProjectionResults成員變量computeMLSWeight成員函數兩個constructor坐標計算函數偏微分計算函數曲率計算函數各式投影函數擬合曲面計算函數前言
PC…
底盘获取线速度,imu获取偏航角速度数据组合为车辆速度信息
需求:获取geometry_msgs::TwistStamped格式的速度信息(角速度+线速度) 方法1:从底盘获取线速度,imu获取偏航角速度数据,然后组合数据发布信息。 方法2:通过融合定位输出的位姿(x,y,yaw),通过前后帧计算线速度和偏航角速度,然后发布信息 方法1实现: 头文件:
#p…
PCL - ICP代碼研讀(三 ) - Registration初始化
PCL - ICP代碼研讀(三 ) - Registration初始化前言setInputSourcesetInputTargetinitComputeinitComputeReciprocal前言
接續PCL - ICP代碼研讀(二 ) - Registration架構,這邊繼續來看Registration成員函數的實現。本…
PCL - ICP代碼研讀(七 ) - determineRequiredBlobData函數
PCL - ICP代碼研讀(七 ) - determineRequiredBlobData函數前言determineRequiredBlobData前言
在computeTransformation函數中有這麼一段代碼: // Make blobs if necessary// ?determineRequiredBlobData();PCLPointCloud2::Ptr target_blo…
PCL - MLS代碼研讀(九)- MLS入口 - process函數
PCL - MLS代碼研讀(九)- MLS入口 - process函數
前言
在PCL - MLS代碼研讀(一)中,我們看到了MLS模塊的入口函數是process,這也是本篇要介紹的內容。
process
process為入口函數,做完一些檢查及必要的初…
PCL - MLS代碼研讀(十)- performProcessing函數
PCL - MLS代碼研讀(十)- performProcessing函數前言performProcessing前言
在PCL - MLS代碼研讀(九)- MLS入口 - process函數中,看到了process函數實際上是performProcessing函數的wrapper,真正做事的其實…
PCL - MLS代碼研讀(十二)- addProjectedPointNormal及copyMissingFields函數
PCL - MLS代碼研讀(十二)- addProjectedPointNormal及copyMissingFields函數前言addProjectedPointNormalcopyMissingFields前言
在PCL - MLS代碼研讀(十)- performProcessing函數和PCL - MLS代碼研讀(十一࿰…
PCL - ICP代碼研讀(六 ) - IterativeClosestPoint架構
PCL - ICP代碼研讀(六 ) - IterativeClosestPoint架構前言usingpublic成員函數constructor和destructorcopy constructordestructorgetConvergeCriteriasetInputSourcesetInputTargetuse_reciprocal_correspondence_的setter和getterprotected成員函數pr…
Windows环境下pcl点云库 安装配置教程
本文为Windows配置点云库pcl步骤,具体win10、visual studio 2019、pcl1.11.1。
【1】下载安装包
Releases PointCloudLibrary/pcl GitHub 其中,AllInOne是一个包含了PCL库所有模块的单独下载包,方便快速获取整个PCL库,而pdb则…
统计计算quark代币的数量和总价值
Python脚本,其主要功能是从指定的服务器获取比特币地址的余额信息,并计算quark代币的数量和总价值。 详细解释:
1. 使用`#!/usr/bin/env python`作为Shebang行,指定使用Python解释器来执行此脚本。 2. 设置编码为UTF-8:`# -*- coding: utf-8 -*-`。 3. 导入所需的库:`re…
Open3D点云数据处理(二十二):最小二乘多项式拟合(手写实现)
文章目录 1 最小二乘多项式拟合原理2 多项式拟合的评估指标3 实现步骤4 完整代码5 计算最小二乘多项式拟合的各种评估指标6 函数封装 my_least_squares_polynomial_fit(pcd, k, evaluation=False)专栏目录:Open3D点云数据处理(Python) 1 最小二乘多项式拟合原理
最小二乘法…
gazebo 仿真 kinect 获取点云数据
项目地址:https://github.com/yym68686/ros-slam
简介
使用 urdf 文件构建仿真机器人,在 gazebo 搭建仿真环境,导入人造卫星的 stl 文件,利用仿真 kinect 深度相机获取人造卫星的点云数据并在 RVIZ 中可视化,将 Poin…
PCL - ICP代碼研讀(十七 ) - CorrespondenceRejectorDistance架構
PCL - ICP代碼研讀(十七 ) - CorrespondenceRejectorDistance架構前言CorrespondenceRejectorDistanceusingconstructor和destructorgetRemainingCorrespondences最大距離的getter和setter點雲,法向量設定相關函數target點雲搜索方法setterap…
通义千问-7B-Chat-8-9 离线整合包 使用 4bit 运行的代码
通义千问-7B-Chat-8-9 离线整合包 使用 4bit 运行的代码;离线包自己去下载,把app.py 文件改成下面的,然后记得安装一个 bitsandbytes 的window 版本, 安装命令放在最后了 import os
#os.system(pip install tiktoken)
#os.system(pip install "modelscope" --upg…

C++ PCL三维点云物体目标识别
程序示例精选 C PCL三维点云物体目标识别 如需安装运行环境或远程调试,见文章底部个人QQ名片,由专业技术人员远程协助! 前言
这篇博客针对<<C PCL三维点云物体目标识别>>编写代码,代码整洁,规则ÿ…
PCL 点云法向量重定向(MST,最小生成树)
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 该方法主要分为两个过程: (1)指定数据点的邻近点数。通过查找每一个点的邻近点集,使用邻近点集的协方差估计出每个点的法向量。 (2)基于连续切平面方向一致性来重定向法向量。论文中的想法是这样的,假设两个…

c++ pcl点云变换骨架枝干添加树叶源码实例
程序示例精选 c pcl点云变换骨架枝干添加树叶源码实例 如需安装运行环境或远程调试,见文章底部个人QQ名片,由专业技术人员远程协助! 前言
这篇博客针对《c pcl点云变换骨架枝干添加树叶源码实例》编写代码,代码整洁,…
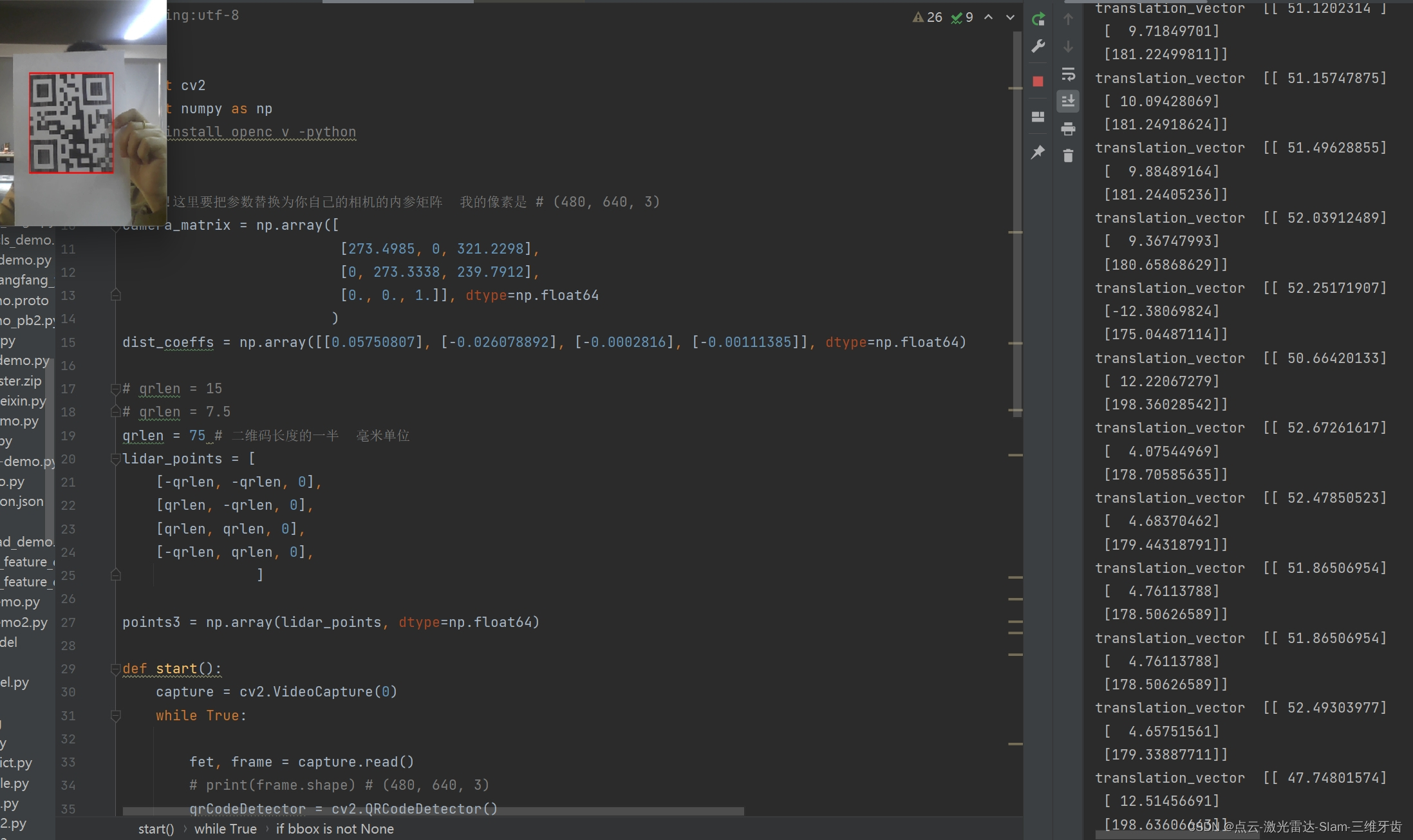
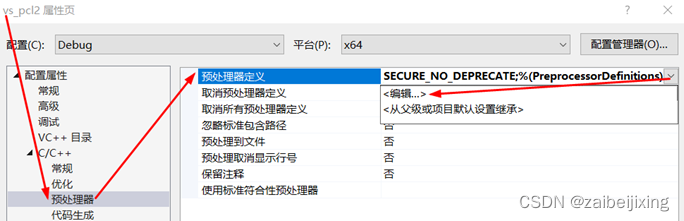
单目相机测距(3米范围内)二维码实现方案(python代码 仅仅依赖opencv)
总体思路:先通过opencv 识别二维码的的四个像素角位置,然后把二维码的物理位置设置为
cv::Point3f(-HALF_LENGTH, -HALF_LENGTH, 0), //tl cv::Point3f(HALF_LENGTH, -HALF_LENGTH, 0), //tr cv::Point3f(HALF_LENGTH, HALF_LENGTH, 0), //br cv::P…
点云 surface 方法总结
点云的表面方法是指通过点云数据来估计和重建物体或场景的表面几何形状。下面总结了几种常见的点云表面方法:
三角化:三角化是最常用的点云表面重建方法之一。它将点云中的点连接成三角形网格,从而重建出物体或场景的表面。常见的三角化算法…
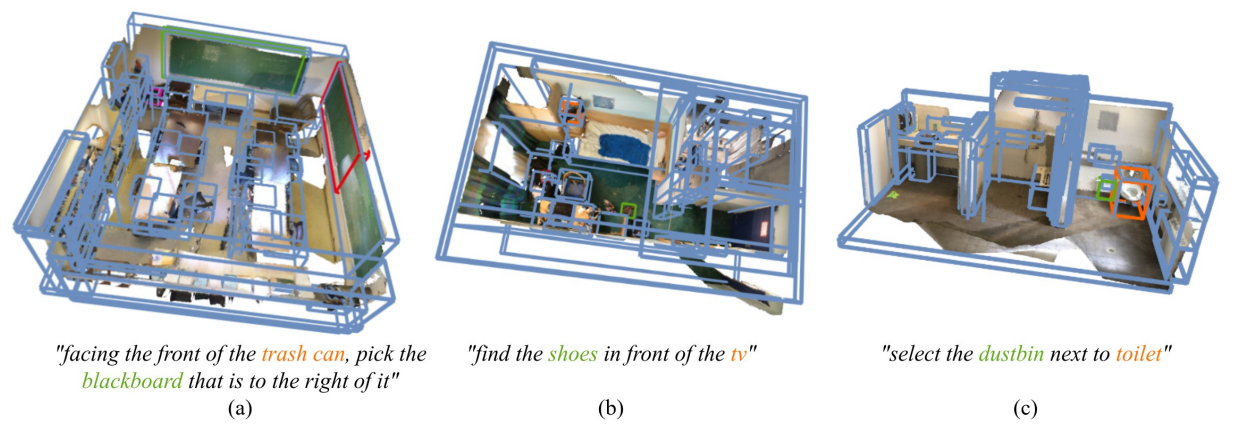
ECCV 22丨BUTD-DETR:图像和点云的语言标定Transformer
来源:投稿 作者:橡皮 编辑:学姐 论文链接:https://arxiv.org/abs/2112.08879[1]
主页链接:https://github.com/nickgkan/butd\_detr[2]
摘要:
在二维和三维场景中,大多数模型的任务都是将指涉…
具有文件操作和滤波功能的Open3D软件界面(附python pyqt 代码)
安装依赖
pip install pyqtgraph -i https://pypi.tuna.tsinghua.edu.cn/simple/
pip install pyopengl -i https://pypi.tuna.tsinghua.edu.cn/simple/对代码的解释: 定义open3d_software类: 这个类继承自QtWidgets.QMainWindow和Ui_MainWindow类,用于创建Open3D软件的主窗…
两百行代码实现简易点云标注工具
夏天来了非常热,LZ周末不想出去玩,于是乎继之前的图片标注工具利用两个晚上写了一个简单的点云标注工具。该工具基于Qt5.14.2-msvc2017(其实LZ的VS版本是2019,似乎兼容)平台C语言开发,用到的第三方库为PCL1…
Three.js 实现简单的PCD加载器(可从本地读取pcd文件)【附完整代码】
1 功能实现
初始会显示我们之前 SfM 做出的点云,包括相机位置可以点击右上角加载你本地的PCD文件可以通过选择多个文件加载多个点云并显示在同一场景中可以通过左上角的控制界面查看/调整点云的属性,如点大小、颜色等可以通过右上角的控制界面选择旋转 …
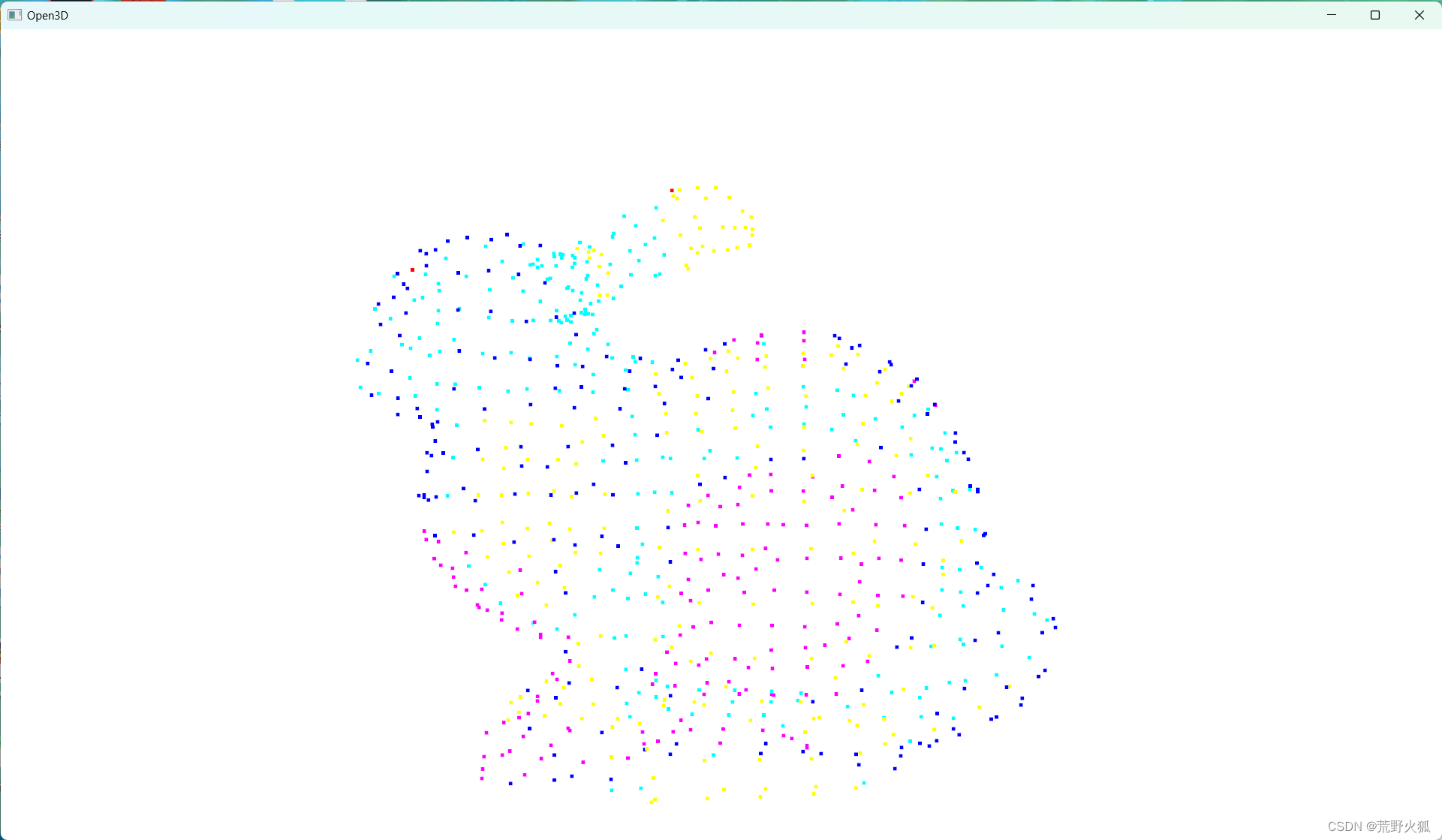
八种点云聚类方法(二)— KMeans
传统机器学习聚类的方法有很多种,并且很多都能够应用在点云上。这是由于聚类方法一般是针对于通用样本,只是样本的维度有所不同。对于三维点云来说,其样本的维度为3。这里主要介绍几种典型的方法及其实现方式,包括DBSCAN、KMeans等…

点云数据从入到arcgis平台、发布场景服务到前端调用
激光雷达是以发射激光束探测目标的位置、速度等特征量的雷达系统。从工作原理上讲,与微波雷达没有根本的区别:向目标发射探测信号(激光束),然后将接收到的从目标反射回来的信号(目标回波)与发射信号进行比较,作适当处理后,就可获得目标的有关信息,如目标距离、方位、…
Open3D点云数据处理(二十):最小二乘直线拟合(三维)
文章目录 1 最小二乘三维直线拟合原理2 代码实现3 直线拟合的评估指标4 计算拟合的评估指标5 np.linalg.lstsq() 函数详解专栏目录:Open3D点云数据处理(Python) 1 最小二乘三维直线拟合原理
最小二乘三维直线拟合的原理是通过最小化数据点到直线距离的平方和,找到最优的直…
点云格式转换:将 ros PointCloud2格式数据转为livox CustomMsg格式
将 ros PointCloud2格式数据转为livox CustomMsg格式 前言点云格式PointCloud2 点云格式livox CustomMsg 点云格式 将 ros PointCloud2格式数据转为livox CustomMsg格式测试 前言
览沃科技有限公司(Livox)成立于2016年。为了革新激光雷达行业࿰…

Sparse Convolution 讲解
文章目录 1. 标准卷积与Sparse Conv对比(1)普通卷积(2) 稀疏卷积(3) 改进的稀疏卷积(subm)2 Sparse Conv 官方API3. Sparse Conv 计算3. 1 Sparse Conv 计算流程3. 2 案例3.2.1 普通稀疏卷积3.2.2 subm模式的稀疏卷积3D点云数据非常稀疏,尤其体素化处理后(比如200k的点放…
c++ 代码连接激光雷达,使用 pybind11 得到python模块,可以直接在python中连接雷达,获取 numpy 格式激光数据
注意: 这个程序最后需要编译为 python 的一个模块,然后导入python中使用
底层原理是python调用c++程序连接激光雷达,然后把获取的数据转换为numpy格式,因为用python太慢了 C++函数,用于获取一个帧的数据并将其转换为Python中的NumPy数组(`py::array_t<float>`)。…
PCL | Ubuntu18安装CloudCompare
文章目录 操作教程 操作教程
CloudCompare下载官网:https://www.danielgm.net/cc/release/
安装flatpak插件
sudo apt install flatpak添加库路径
flatpak remote-add flathub https://flathub.org/repo/flathub.flatpakrepo安装CC
flatpak install flathub or…

激光雷达生成的图像检测关键点用来辅助里程计的方案
文章:LiDAR-Generated Images Derived Keypoints Assisted Point Cloud Registration Scheme in Odometry Estimation
作者:Haizhou Zhang , Xianjia Yu, Sier Ha , Tomi Westerlund
编辑:点云PCL 欢迎各位加入知识星球,获取PDF…

PCL MLS論文Computing and Rendering Point Set Surfaces研讀筆記
PCL MLS論文Computing and Rendering Point Set Surfaces研讀筆記前言定義曲面 - 投影投影步驟尋找點<span class"katex--inline">r</span>的擬合平面(或說座標系)<span class"katex--inline">H</span>尋找由<span class"…
PCL - MLS代碼研讀(一)- MLS測試
PCL - MLS代碼研讀(一)- MLS測試前言測試曲面重建測試SAMPLE_LOCAL_PLANE上採樣方法測試VOXEL_GRID_DILATION上採樣方法主程序MLS module結構前言
PCL的MLS模塊用於對點雲做平滑處理(或說曲面重建)及上採樣,其中MLS的…
点云处理【三】(点云降采样)
点云降采样
第一章 点云数据采集 第二章 点云滤波 第二章 点云降采样 1. 为什么要降采样?
我们获得的数据量大,特别是几十万个以上的点云,里面有很多冗余数据,会导致处理起来比较耗时。 降采样是一种有效的减少数据、缩减计算量…
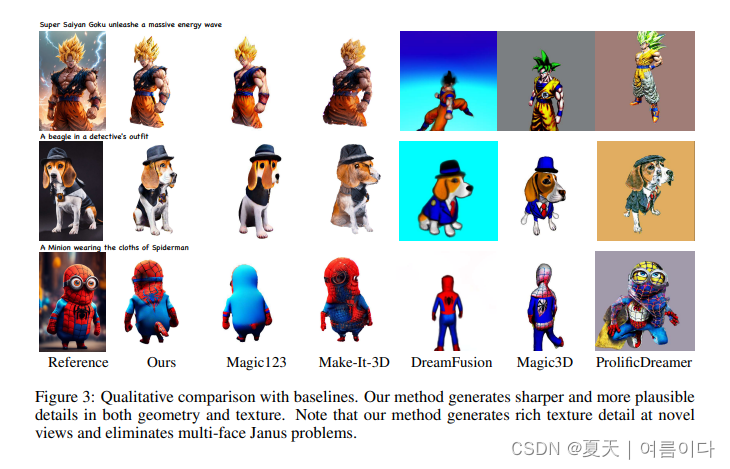
生成模型 | 三维重建(3D reconstruction)调研及总结【20231219更新版】
本文是关于三维重建的论文调研,主要集中于基于图片到3d的模型,其中期刊会议标志如下:
[🤖 ICCV 2023 ] 1.3D综述系列
2019_Image-based 3D Object Reconstruction: State-of-the-Art and Trends in the Deep Learning Era 论文地…
点云从入门到精通技术详解100篇-基于语义 SLAM 的点云融合
目录
前言
视觉 SLAM 技术与研究现状(Visual SLAM Technology and ResearchStatus)
视觉 SLAM 技术
研究现状

【ArcGIS微课1000例】0060:ArcGIS打开las格式点云数据的方法
文章目录 1. 使用上下文菜单创建 LAS 数据集2. 使用地理处理工具创建 LAS 数据集3. 显示LAS数据集LAS 数据集是位于文件夹中的独立文件,并且引用 LAS 格式的激光雷达数据和用于定义表面特征的可选表面约束要素。ArcGIS中,可使用创建 LAS 数据集工具或 ArcCatalog 中文件夹的上…
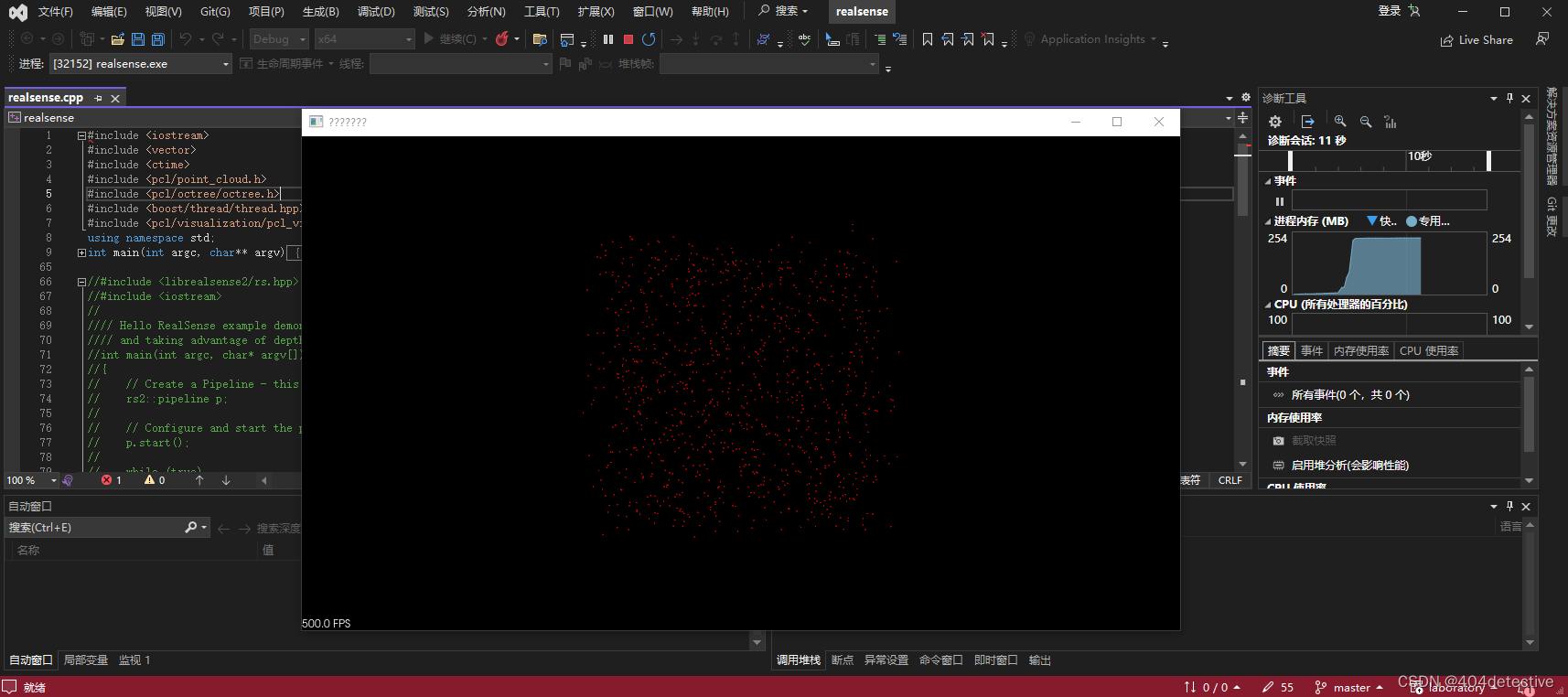
RealSense最简单配置环境只需要5分钟,不用自行添加任何包含目录、库目录。Visual Studio2022、C++。
又开始搞点云了,现在用的是Intel的realsense。
看网上步骤都挺繁琐的,本文搭建只需要3分钟。直接用官方提供的属性表,不用自行添加任何包含目录、库目录。
第一分钟:用Visual Studio新建一个工程(此时你是没有intel.…
点云绪论(点云数据及获取、点云数据处理、常用软件及开源库)
文章目录 点云数据及获取点云数据处理常用软件及开源库 点云数据及获取 定义 点云(point cloud): 三维点的数据集合属性 三维坐标 强度 颜色 时间戳 点云组织形式: organized: the point cloud is laid out as a 2D array of points that resemblesan image like structure…
点云从入门到精通技术详解100篇-基于尺度统一的三维激光点云与高清影像配准(续)
目录 以三维激光点云为基准的影像点云尺度估计 3.1 基于 Scale ratio ICP 的尺度估计 3.1.1 Spin image 介绍
Open3d读写pcd点云文件
1 Open3d 安装 Open3d是由Intel发布的一个开源库,支持快速开发和处理3D数据。Open3D在c和Python中公开了一组精心选择的数据结构和算法。后端是高度优化的,并且是为并行化而设置的。 Open3d直接使用pip安装即可。解决下载慢的问题,请切换下载…
【点云预处理】N种点云数据数据预处理方法 — 持续总结和更新(二)
1~10种点云预处理方法请参考:10种点云数据数据预处理方法 — 持续总结和更新(一)_Coding的叶子的博客-CSDN博客_点云预处理。深度学习中点云基本数据处理和增强方式,包括点云归一化、随机打乱、随机平移、随机旋转、随机缩放和随机…

ICP變種Point-To-Plane算法推導
ICP變種Point-To-Plane算法推導前言損失函數R,t參數化最小二乘問題求解Moore–Penrose偽逆SVD矩陣分解前言
接續ICP(Iterative Closest Point)算法推導,本篇介紹ICP的變種Point-To-Plane損失函數及其求解方法。
本文同樣整理自深藍學院三維…
点云从入门到精通技术详解100篇-基于点云特征的工业机械臂六自由度抓取(中)
目录 2.3.2 硬件系统连接 2.4 软件系统(Software System) 2.5 6-DOF 抓取位姿表示(6-DOF Grasp Pose Representation)
PCL - ICP代碼研讀(二二 ) - TransformationEstimationSVD實現
PCL - ICP代碼研讀(二二 ) - TransformationEstimationSVD實現
前言
TransformationEstimationSVD類別中有五個estimateRigidTransformation函數,其中四個是public的,另一個是protected的。前四個public的estimateRigidTransfor…
pcl经典算法60例——(1)打开并显示点云
一、搭建MFC框架
1、环境说明
本教程为vs2022,pcl1.12.1版本,其他版本自己进行适当修改,仅供参考。
2、方法步骤
(1)新建项目,选择“基于对话框”,然后点击“下一步” 二、配置pcl环境
关于配置环境,网…
两种点云分割(一)— RANSAC分割平面
点云分割的目的是将点云中属于不同部分的点加以区分。最直接的点云分割方法就是聚类,八种点云聚类方法(一)— DBSCAN_Coding的叶子的博客-CSDN博客这个在前面几节之中已经进行了详细介绍。本节将简要介绍另外几种点云分割的方法。采用深度学习…
PCL - MLS代碼研讀(六)- 各式投影函數
PCL - MLS代碼研讀(六)- 各式投影函數前言projectPointToMLSPlaneprojectPointSimpleToPolynomialSurfaceprojectPointOrthogonalToPolynomialSurfaceprojectPointprojectQueryPoint前言
本篇終於接近MLS模塊的核心部分,主要介紹各式投影函數…
【最详解】如何进行点云的凹凸缺陷检测(opene3D)(完成度80%)
文章目录 前言实现思路想法1想法2想法3 补充实现想法1想法2代码 想法3代码 总结 前言
读前须知: 首先我们得确保你已经完全知晓相关的基本的数学知识,其中包括用最小二乘法拟合曲二次曲面,以及曲面的曲率详细求解。若还是没弄清楚࿰…
堆体扫描点云体积计算实现思路分享
做了一个初步的 demo 实验, 计算一堆沙子或者煤堆这种物体的扫描点云的体积 思路就是分块计算每个小的立方体的体积,然后累加,wechat 394467238, 具体的实现细节略微麻烦一点,代码暂时不放了
自定义的AlphaShape类来提取平面点云数据的边界点 open3d c++ 代码 平面点云边界提取算法
使用了自定义的AlphaShape类来提取点云数据的边界点,并使用Open3D库进行可视化。 引入必要的头文件和命名空间: main函数: 读取点云数据文件到cloud对象。如果读取失败,则输出错误信息并返回。将点云数据全部着色为蓝色。创建一个空的点云对象boundaryCloud,用于存储提取…
PCL - ICP代碼研讀(十四 ) - CorrespondenceEstimation架構
PCL - ICP代碼研讀(十四 ) - CorrespondenceEstimation架構前言CorrespondenceEstimationusingconstructor和destructordetermineCorrespondences和determineReciprocalCorrespondences函數clone函數前言
CorrespondenceEstimation類別繼承自抽象類別Co…
PCL - ICP代碼研讀(十六 ) - CorrespondenceRejector架構
PCL - ICP代碼研讀(十六 ) - CorrespondenceRejector架構前言CorrespondenceRejectorusingconstructor和destructor輸入點對的setter和getter配對拒絕相關函數getClassName點雲,法向量設定相關函數protected成員前言
CorrespondenceRejector…
PCL - ICP代碼研讀(二七) - TransformationEstimationPointToPlaneLLS實現
PCL - ICP代碼研讀(二七) - TransformationEstimationPointToPlaneLLS實現前言TransformationEstimationPointToPlaneLLSestimateRigidTransformation的wrapperconstructTransformationMatrixestimateRigidTransformation前言
TransformationEstimation…
点云学习(1): 获取点云的包络框
1. 记录一些容易忘记的点云操作----后续一定补充
1.获取点云的包络框
下面的get_axis_aligned_bounding_box(),get_min_bound(),get_max_bound()等函数非常好用
import open3d as o3d
import numpy as np# 读取点云数据
pcd o3d.io.read_point_cloud("input.pcd"…
【点云前视图FV】详细理解雷达点云前视图(FV, Front View)
本节详细介绍雷达点云前视图(FV, Front View)的基本原理和计算过程,含原理介绍、代码、数据和可视化效果。
1 前视图基本原理 雷达在工作时通常是围绕一个轴进行旋转扫描。对于单线激光雷达来说,旋转扫描数据可以得到…
使用PyQt5和pyqtgraph,Open3D库创建的软件界面,包含读取,显示和保存点云文件的功能(附python代码)
安装依赖
# pip install pyqtgraph -i https://pypi.tuna.tsinghua.edu.cn/simple/
# pip install pyopengl -i https://pypi.tuna.tsinghua.edu.cn/simple/使用PyQt5和pyqtgraph库创建的Open3D软件界面。步骤如下:
1. 导入必要的库和模块,包括PyQt5、uic、pyqtgraph、nump…
C++ PCL点云dscan密度分割三维
程序示例精选 C PCL点云dscan密度分割三维 如需安装运行环境或远程调试,见文章底部个人QQ名片,由专业技术人员远程协助! 前言
这篇博客针对《C PCL点云dscan密度分割三维》编写代码,代码整洁,规则,易读。…
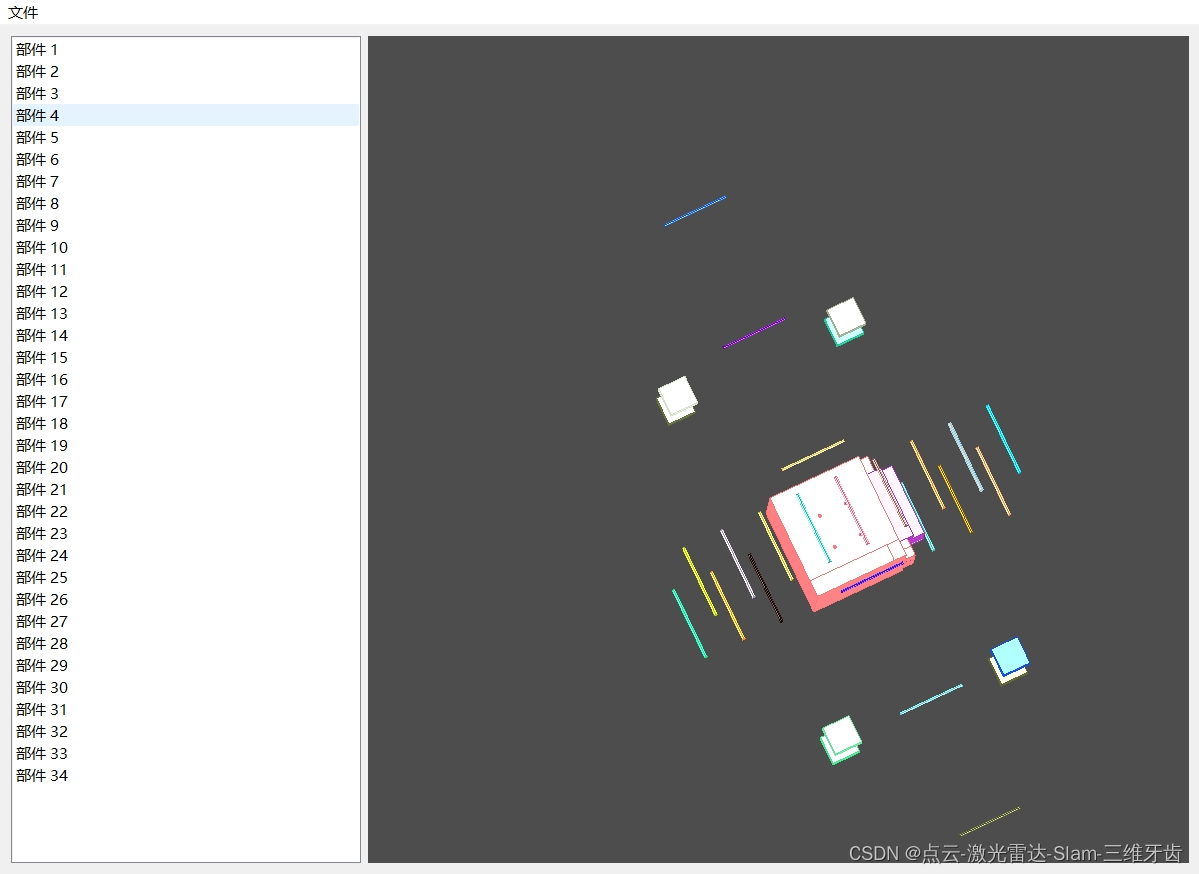
PythonOcc + pyqt 显示——stp step文件导入 部件识别 爆炸图展示
使用 occ 7.4.0 版本,pyqt5, 解决了init 缺少window_handle 的问题,另外添加一个左边的显示窗口 import ctypes
import logging
import os
import sysfrom OCC.Display import OCCViewer
from PyQt5 import QtCore, QtGui, QtOpenGL, QtWidgets# check if signal available, …

open3d生成ply文件在pcl中无法读取问题
目录问题原因解决代码完问题
open3d生成的ply文件在pcl中无法解析,出现 Failed to find match for field ‘x’. Failed to find match for field ‘y’. Failed to find match for field ‘z’. 导致文件无法读取
原因
open3d保存的ply文件可以是binary&#x…
点云从入门到精通技术详解100篇-基于 PoinTr 模型的牙齿点云补全(续)
目录 3 基于 CEC PoinTr 的牙齿点云补全算法 3.1 数据集构建 3.1.1 小样本 ShapeNet 数据集 3.1.2 牙齿点云数据集</
点云从入门到精通技术详解100篇-基于 3D 激光雷达的车厢冻煤存量检测(续)
目录 3.2 点云数据校正(Point cloud data correction) 3.2.1 基于静态点云的倾斜校正 3.2.2 激光雷达运动畸变去除

Halcon 3D相关案例分享
文章目录 一、预处理1、平滑滤波算子说明平滑效果图 二、检测1、外观缺陷检测算子说明缺陷检测效果图 2、点云边界框算子说明边界框效果图 3、平面度检测算子说明平面度效果图 三、量测1、高度测量算子说明测量效果图 2、体积测量算子说明测量效果图 四、配准1、根据模型配准算…
点云处理【七】(点云配准)
点云处理
第一章 点云数据采集 1.点云配准
点云配准是将两个或多个点云数据集融合到一个统一的坐标系统中的过程。这通常是为了创建一个完整的模型或融合从不同视角采集的数据。 点云配准一般分为粗配准和精配准,粗配准指的是在两幅点云之间的变换完全未知的情况下…
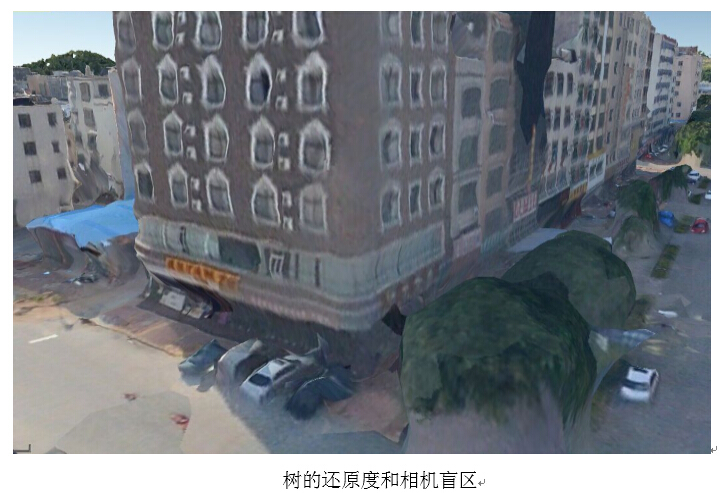
倾斜摄影测量知识基础
所谓“站在巨人的肩膀上”在这篇文章中就很好的体现出来了,本文的一些图和一些概念就是借鉴“巨人”发表的文章中的图和概念。这还得感谢这些“巨人”把我们领向一条光明大道。我不是摄影测量的专业人士,GIS圈也只是个刚入门的菜鸟。请允许我从一个菜鸟的…

《点云处理》平面拟合
前言
在众多点云处理算法中,其中关于平面拟合的算法十分广泛。本篇内容主要是希望总结归纳各类点云平面拟合算法,并且将代码进行梳理保存。
环境:
VS2019 PCL1.11.1
1.RANSAC
使用ransac对平面进行拟合是非常常见的用法,PCL…
逐点插入法实现 Delaunary三角网 ( 附 C++ 代码)
逐点插入法作为一种经典的凸闭包收缩算法,其思想是:首先找到包含数据区域的最小凸包边形,并从该多边形开始从外到内形成Delaunary三角网。因此其每次插入一个新的点就会删除相应的三角形来构建性的三角网,这个过程中常常伴随着大量的查询计算过程,这也导致了其在面对大量数…
【PCL】(二十九)渐进形态学滤波器分割地面点
(二十九)渐进形态学滤波器分割地面点
论文:A Progressive Morphological Filter for Removing Nonground Measurements from Airborne LIDAR Data
bare_earth.cpp
#include <iostream>
#include <pcl/io/pcd_io.h>
#include &…
C++结合PCL库实现曲率降采样
// DownSampleOptimizer.cpp : 此文件包含 "main" 函数。程序执行将在此处开始并结束。 //
#include <iostream> #include <pcl/io/pcd_io.h> #include "down_sample_optimizer.h" #include <pcl/point_cloud.h> #include <pcl/poi…

Trimble RealWorks处理点云数据(七)之点云导入3dmax
效果 背景
有时候我们需要通过点云数据来逆向建模,而建模软件常用的有3dmax,SketchUp等,那如何将点云数据导入3dmax来建模呢,下面我们来了解下
步骤
1、las导入Trimble RealWorks 2、对点云数据预处理
可以参考这篇文章 TrimbleRealWorks点云数据预处理
3、导出rcp格式…
PCL点云处理之三点定圆 (二百三十二)
PCL点云处理之三点定圆 (二百三十二) 一、算法介绍二、算法实现一、算法介绍 二维平面,给定三个点,确定唯一圆的中心和半径参数。
二、算法实现
#include <iostream>
#include <cmath>struct Point
{
PCL 平面拟合——RANSAC
文章目录 一、基本思想二、代码示例1、参数选择2、核心代码3、完整代码4、结果展示三、关于 RANSAC 的一些思考参考文献一、基本思想
随机抽样一致性算法RANSAC(Random sample consensus)是一种迭代的方法,从一系列包含有离群值的数据中计算数学模型参数的方法。RANSAC算法本…
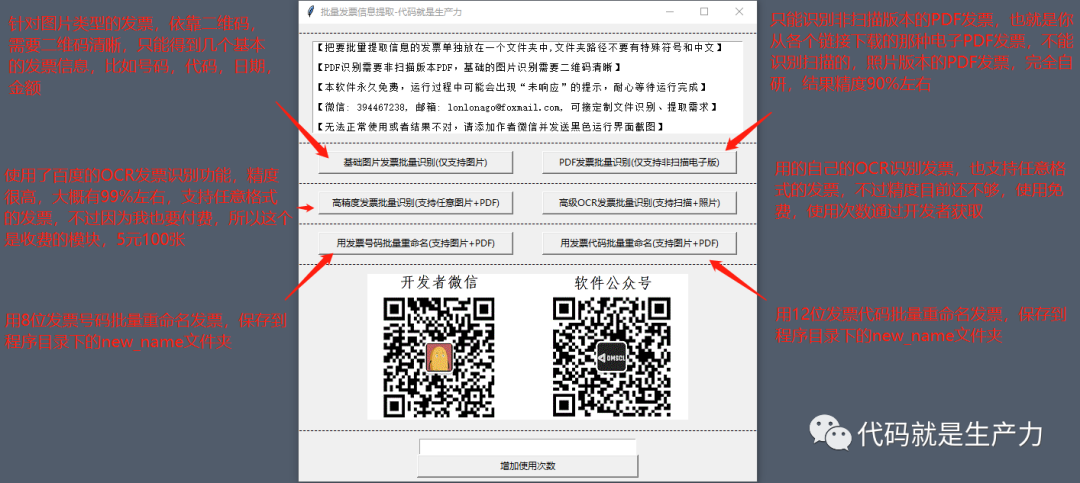
发票批量信息提取软件 6.2 更新
6.2更新 OFD 发票增加了识别稳定性,之前的有个bug 付费的高级功能更加稳定了,之前会经常出现识别错位的情况 修改了一个严重的bug 6.0更新 可以用支付宝在线支付购买次数了,终于不用每次我手动给用户发次数码了。。泪 朋友圈或微信人数大…
点云格式介绍(更新中,待补充)
常见点云存储方式有pcd、ply、txt、bin文件。
一、点云的基本组成
点云组成可以是以下几种形式数据的排列组合。 (1)x、y、z:点云的空间坐标。 (2)i:强度值,强度反应了点的密集成度。 &#x…
计算机视觉 用于网格/点云等数据可视化的Python库
一、3D可视化 很长一段时间,人们主要使用Matplotlib在Python中可视化3D内容。但是它不支持 GPU 硬件加速,所以很多人使用点云库(PCL)作为网格和点云可视化和分析的工具。PCL当然是用于 3D 分析的最佳库之一,而且它是用 C++ 构建的,Python包装器仅包含主PCL库功能的一小部…

自动驾驶高效预训练--降低落地成本的新思路(ReSimAD)
自动驾驶高效预训练--降低落地成本的新思路 1. 引言定义高效预训练 2. ReSimAD2.1引言2.2 主要贡献1.发布大规模ReSimAD数据2.ReSimAD pipeline 2.3 实验 上海人工智能实验室
1. 引言 高效的预训练,是大模型的第一步 大模型的两种能力
海量数据分布–未知场景泛化…
【最远点采样FPS】点云采样方式(一) — 最远点采样
点云最远点采样FPS(Farthest Point Sampling)方法的优势是可以尽可能多地覆盖到全部点云,但是需要多次计算全部距离,因而属于复杂度较高的、耗时较多的采样方法。
1 FPS采样步骤 FPS采样步骤为: (1)选择一个初…

OpenPCDet复现过程记录
0、前言 OpenPCDet项目之前我就复现过,一个很优秀的项目,这几天又需要用到这个项目,再次复现遇到了不少问题,特此记录复现的流程 1、环境准备
1.1、前置条件
以下是我安装的版本
CUDA 11.3CUDNN 8.2.1 CUDA和CUDNN安装可以参考…
C# 读取pcd点云文件数据
pcd文件有ascii 和二进制格式,ascii可以直接记事本打开,C#可以一行行读。但二进制格式的打开是乱码,如果尝试程序中读取,对比下看了数据也对不上。 这里可以使用pcl里的函数来读取pcd,无论二进制或ascii都可以正确读取…
fastlio2 保存每帧的点云和每帧的里程计为单独的文件做后端回环优化和手动回环优化
为了 提供数据做后端回环优化和手动回环优化,需要保存每帧的点云和每帧的里程计为单独的文件,并且需要保存的名字为ros时间戳。 效果很好,比我自己写的手动回环模块好用
// This is an advanced implementation of the algorithm described in the
// following paper:
/…
【GlobalMapper精品教程】064:点云提取(按范围裁剪)
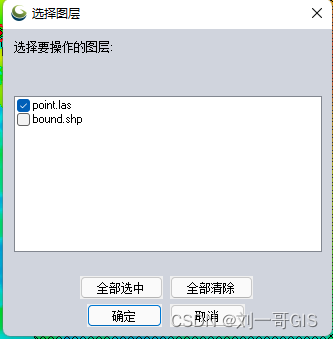
本文讲解Globalmapper中进行点云数据提取(按范围裁剪)的方法。 文章目录 一、加载点云及范围数据二、点云裁剪三、注意事项一、加载点云及范围数据
加载配套实验数据包中的实验数据data064.rar中的point.las点云与bound.shp面状范围数据,如下图所示: 二、点云裁剪
接下来…
【python三维深度学习】python三维点云从基础到深度学习
从三维基础知识到深度学习,将按照以下目录持续进行更新。更新完成的部分可以在三维点云专栏中查看。https://blog.csdn.net/suiyingy/category_11740467.htmlhttps://blog.csdn.net/suiyingy/category_11740467.html
1、点云格式介绍(已完成)…

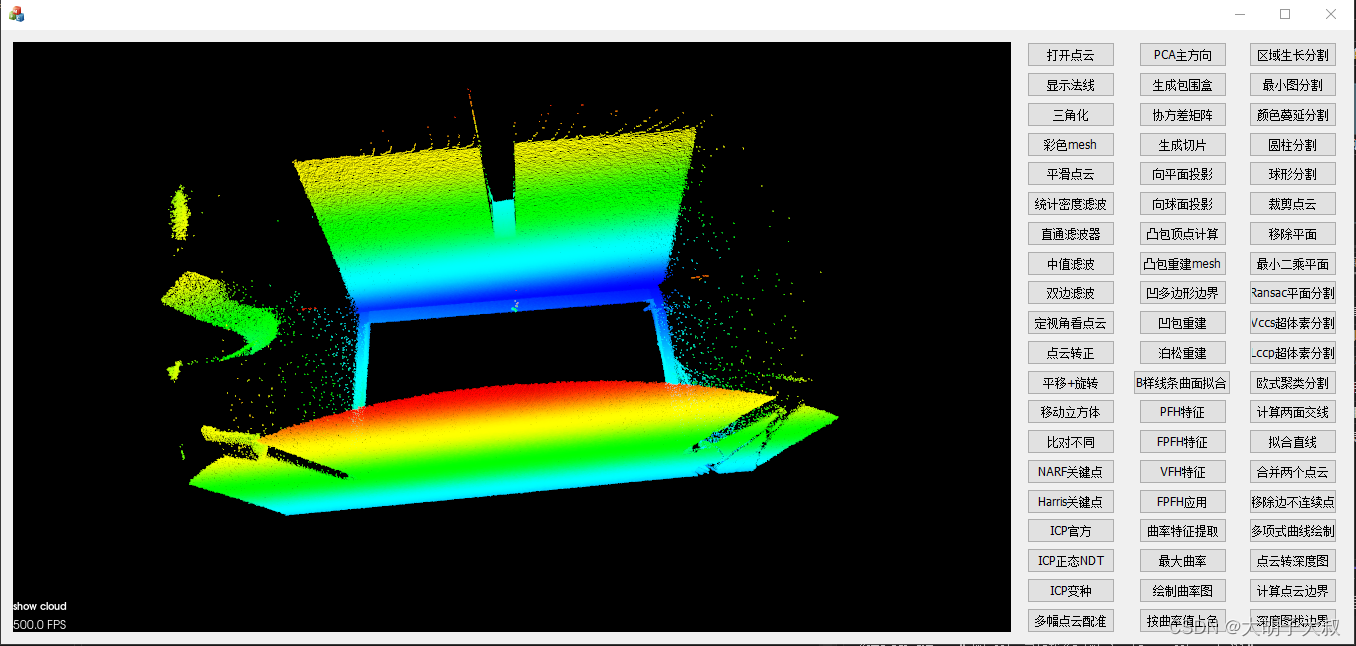
EasyCloud软件简介
运行环境:Win10 PCL1.9 VTK8.1 Qt5.12 VS2017
基于PCL点云库的三维点云数据处理软件
1.软件用户界面
本软件的用户界面主要包括以下几个部分(如图1):
[1]菜单栏,将软件功能模块划分为不同菜单&…

【ArcGIS Pro微课1000例】0031:las点云提取(根据范围裁剪点云)
本文讲解ArcGIS Pro3.0中,las点云数据的提取(根据范围裁剪点云)方法。 文章目录 一、加载数据二、工具介绍三、点云裁剪一、加载数据
打开ArcGIS Pro,新建地图,加载配套实验数据包中的0031.rar中的点云数据point.las与范围bound.shp,如下图所示: 二、工具介绍
名称:提…
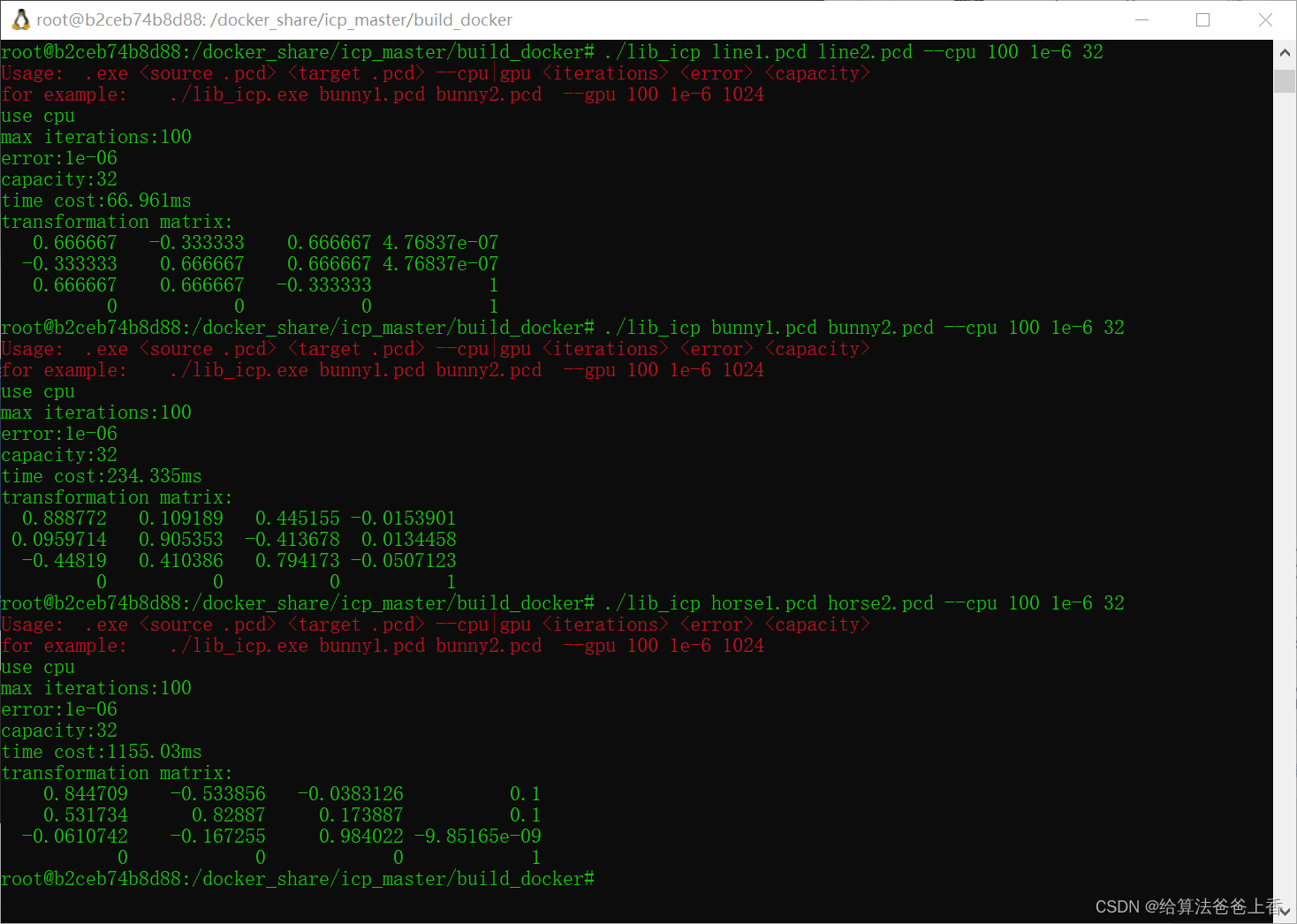
ICP算法加速优化--多线程和GPU
LZ之前的文章ICP算法实现(C) 用C实现了基础的ICP算法,由于该算法是一种迭代的优化算法,里面含有大量循环操作以及矩阵运算,可以通过使用多线程或者GPU硬件来进行加速,具体分别可以通过OpenMP和CUDA编程实现…
PCL入门1之点云读取及可视化
0 引言
本文主要记录在Ubuntu系统的PCL点云库安装过程,以及PCL点云读取和可视化的c代码示例。
1 PCL安装
本文是安装了pcl1.8大版本,可先下载 下载pcl 1.8.1 版本(点击Source code(zip)
先安装pcl1.8.1所需的依赖库࿱…

RGB-D基准测试工具:绝对轨迹误差 (ATE)、相对位姿误差 (RPE)和从图像生成点云
在估计RGB-D相机轨迹并将其保存到文件中后,我们需要通过将其与地面事实进行比较来评估估计轨迹中的误差。有不同的错误指标。两种突出的方法是绝对轨迹误差(ATE)和相对姿势误差(RPE)。ATE非常适合测量可视 SLAM 系统的…

使用MeshLab软件处理pcd点云文件
目录前言1.安装MeshLab软件2.利用pcl库将pcd文件转成ply文件3.利用MeshLab旋转ply点云4.将ply文件转为pcd文件5.将ply文件转为pcd文件(添加读取配置文件版本)前言
在使用D435i相机跑ORB-SLAM2_RGBD_DENSE_MAP-master稠密建图的过程中,发现最…
Eigen计算三维向量的夹角
目录 写在前面原理代码参考完 写在前面
1、本文内容 使用Eigen计算两个向量之间的刚体变换; 当两个向量是点云平面法向量时,也就知道了这两个平面点云之间的刚体变换
2、平台 windows, linux 3、转载请注明出处: https://blog.csdn.net/qq_…
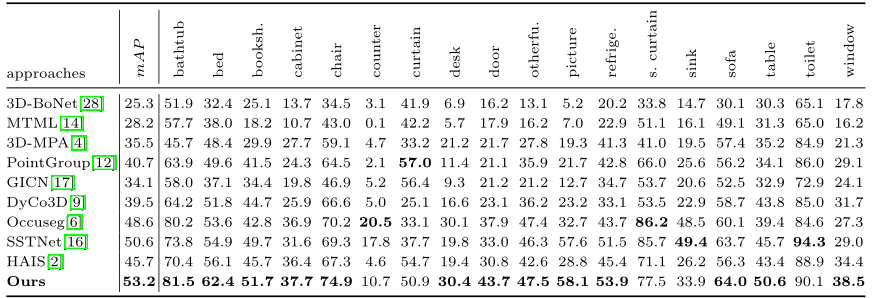
3D Instances as 1D Kernels
Abstract
我们引入了一种3D实例表示,称为实例内核,其中实例由一维向量表示,这些向量对3D实例的语义、位置和形状信息进行编码。我们表明,实例内核通过简单地扫描整个内核来实现简单的mask推断场景,避免严重依赖标准3D…

点云拟合平面原理和实现(Halcon)
最近学习了一下拟合平面的原理,看了这篇文章最小二乘拟合平面(C版) - 知乎
讲到了以下几种方法,我这里在halcon中对其一一实现。
一、算法原理
1,直接求解法 2.使用拉格朗日乘子法 3 SVD分解法 二、Halcon实现
1.各方法对比
在halcon中…
Open3D点云数据处理(二十一):最小二乘多项式拟合
文章目录 1 最小二乘多项式拟合原理2 多项式拟合的评估指标3 使用np.polyfit()函数实现3.1 np.polyfit() 函数详解3.2 代码实现3.3 使用numpy.poly1d()函数将多项式系数转换为拟合方程4 注意事项专栏目录:Open3D点云数据处理(Python) 1 最小二乘多项式拟合原理
最小二乘法是…
使用g2opy 做一个简单的二维回环优化 Slam(附python代码)
代码实现了一个姿态图优化的算法,使用了G2O库进行图优化。下面是代码的主要部分: 导入必要的库:numpy用于数值计算,g2o是一个用于图优化的库,matplotlib用于绘图。 定义了一些辅助函数: quat_mult:四元数的乘法。quat_inv:四元数的逆。quat_to_rot:将四元数转换为旋转…
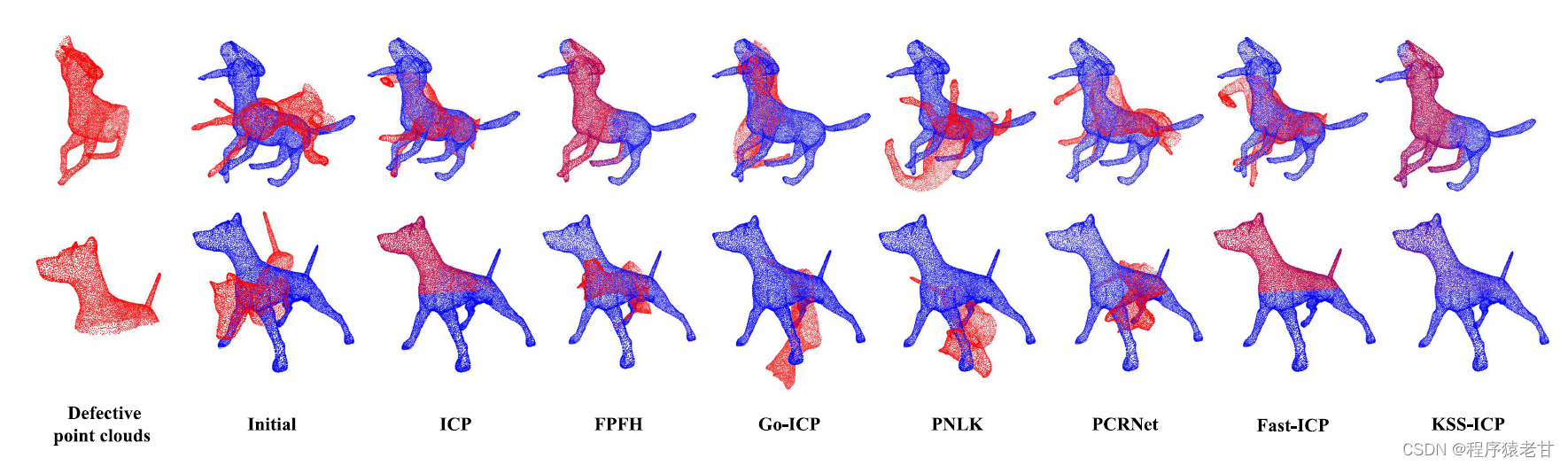
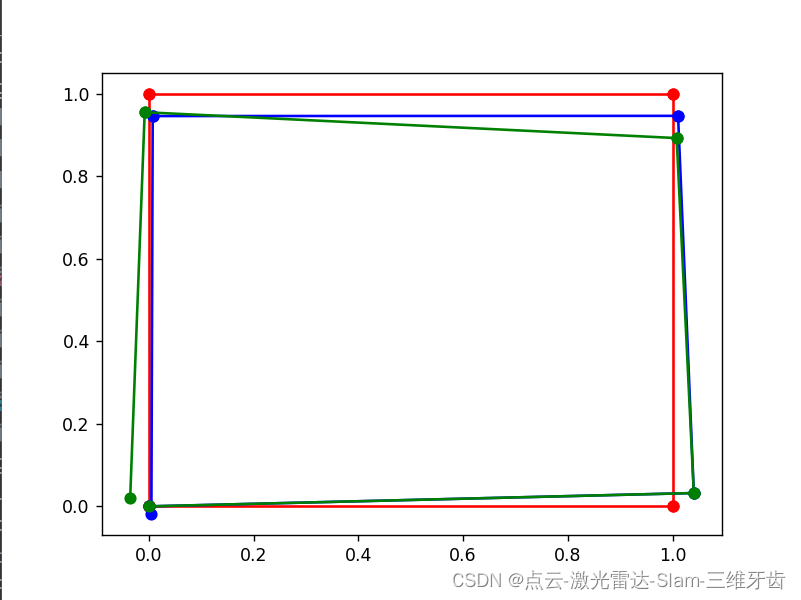
KSS-ICP: 基于形状分析技术的点云配准方法
目录 1. 概述 2. 算法实现 3. 实验结果 总结 Reference 三维点云配准是三维视觉领域一个经典问题,涉及三维重建,定位,SLAM等具体应用问题。传统的配准可以被分为两条技术路线,即基于全局姿态匹配的方法以及基于特征点对应的方法。…
将深度图像数据转换为点云数据,有误差(附 matlab 代码)
首先,加载深度图像数据。然后获取深度图像的大小(行数和列数)。
接下来,通过文件选择对话框让用户选择偏航角数据文件,并加载偏航角数据,获取每一列的偏航角数据,然后,将偏航角数据进行转换,将角度转换为弧度制。
这里还自定义了俯仰角(pitch)的数值,并将其转换为…
改进的KMeans 点云聚类算法 根据体元中的点数量计算点密度,并获取前K个点密度最大的体元作为初始聚类中心(附 matlab 代码)
KMeans函数的主要逻辑如下: 使用InitCenter函数初始化聚类中心,该函数根据体元密度选择初始聚类中心。该函数的输入参数包括数据(data)、聚类中心数量(centerNum)和体元数量(voxelNum)。根据点云的取值范围计算包围盒的体积(V)和体元边长(d)。根据体元边长将点云数…
CGAL 点云RANSAC提取平面
文章目录 一、简介二、相关参数三、代码实现四、实现效果参考资料一、简介 CGAL中,该方法将一组无法向量的点集作为输入,输出一组指定形状的点云。其中形状是通过ransac类型指定。基本的RANSAC方法重复以下步骤: 从输入点随机选取样本;为选定的样本拟合形状;计算形状的内部点…
【CASS精品教程】cass3d加载点云(.ilas)并处理应用
本文讲解cass11.0 3d中将ilas点云转为las加载并进行后续处理。(cass11.0下载与安装) 一、ilas点云格式介绍
点云ilas格式是现今数字化三维模型建模的--种普遍被使用的数据格式,也被称作点云、点集或聚集点。它把地球表面上的物体,比如森林、海洋、河流、山脉等自然物体,以…

【GlobalMapper精品教程】073:像素到点(Pixels-to-Points)从无人机图像轻松生成点云
文章目录 一、工具介绍二、生成点云三、生成正射四、生成3D模型五、注意事项一、工具介绍
Global Mapper v19引入的新的像素到点工具使用摄影测量原理,从重叠图像生成高密度点云、正射影像及三维模型。它使LiDAR模块成为已经功能很强大的的必备Global Mapper扩展功能。
打开…
点云从入门到精通技术详解100篇-基于三维点云的路况语义分割(续)
目录 基于多尺度特征融合和多损失监督的点云分割模型设计 3.1 RandLA-Net 网络 3.2 MFFRand 网络
【点云上采样】三维点云特征上采样
一维和二维数据上采样通常是通过插值的方法来增加点的个数。三维点云上采样理论上也可以通过这个方法来进行。这些上采样的方法均是增加点的数量。但三维空间中点的分布并不是很均匀,不便于定义插值点的位置。因此,本节主要是针对于点云的特征进行上采样…
【PCL】(九)点云体素下采样
(九)Filtering 体素下采样
点云样例: https://raw.github.com/PointCloudLibrary/data/master/tutorials/table_scene_lms400.pcd
以下程序实现对读取的点云进行体素下采样,并将得到的点云保存。
voxel_grid.cpp
#include <…
【Range Image】 提取Range Image的边界
之前写过: https://blog.csdn.net/weixin_45824067/article/details/131343945

基于激光雷达点云(lidar)的目标检测方法之BEV
基于激光雷达点云(lidar)的目标检测方法之BEV 附赠自动驾驶学习资料和量产经验:链接
基于lidar的目标检测方法可以分成3个部分:lidar representation,network backbone,detection head,如下图所…
PCL点云处理之配准中的匹配对连线可视化显示 Correspondences(二百一十九)
PCL点云处理之配准中的匹配对连线可视化显示 Correspondences(二百一十九) 一、算法介绍二、算法实现1.可视化代码2.完整代码(特征匹配+可视化)最终效果一、算法介绍
关于点云配准中的匹配对,如果能够可视化将极大提高实验的准确性,还好PCL提供了这样的可视化工具,做法…
激光雷达和点云处理的4个工作流程
随着激光雷达传感器出现在智慧城市、无人机、电影制作、汽车、手机等领域,点云数据自我上次在2013年发表相关文章以来已经有了显著的发展,我觉得现在是时候重新审视这种了不起的数据类型了。
现如今,点云通常以毫米级的精度来表现景观、建筑…
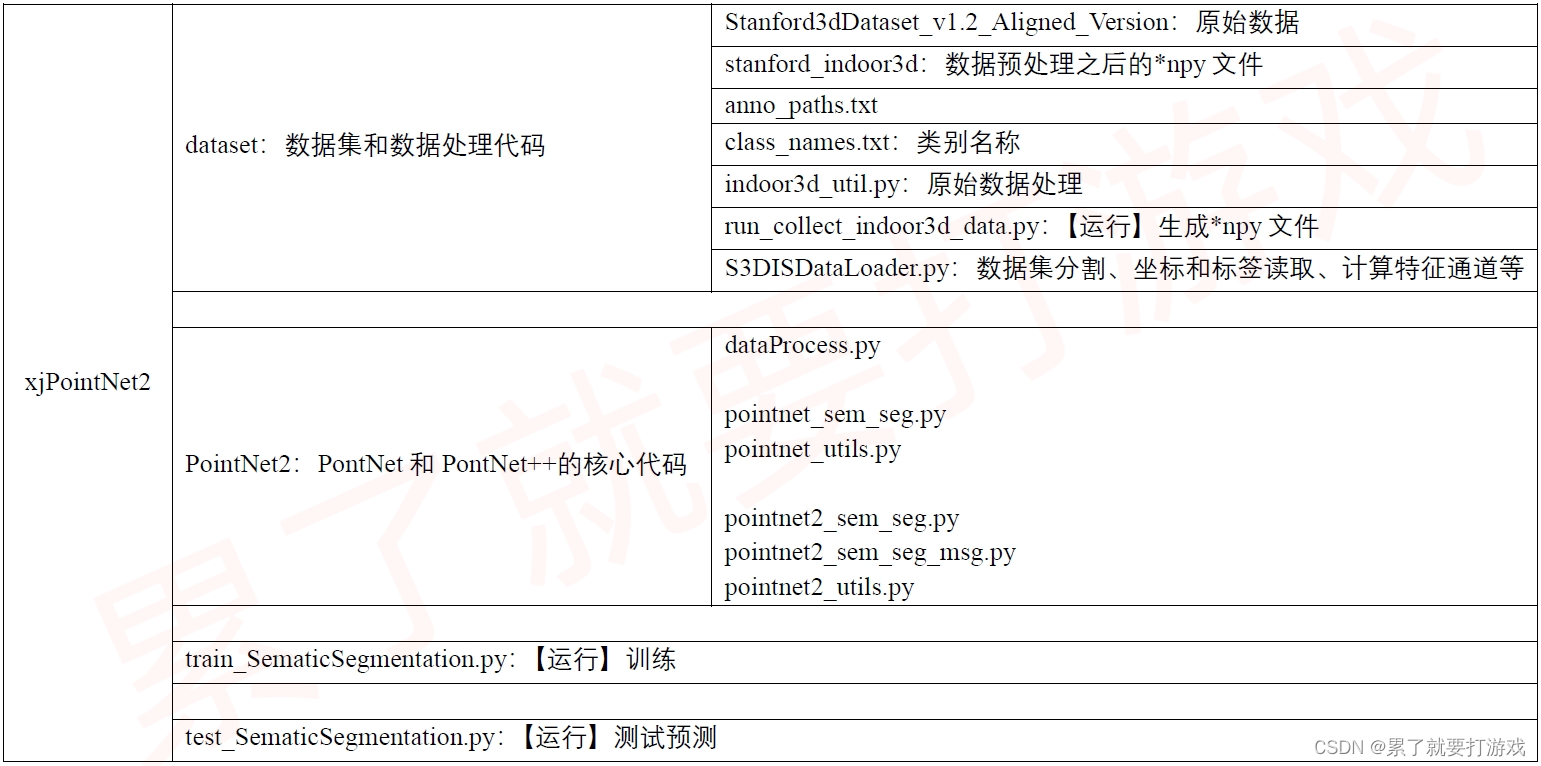
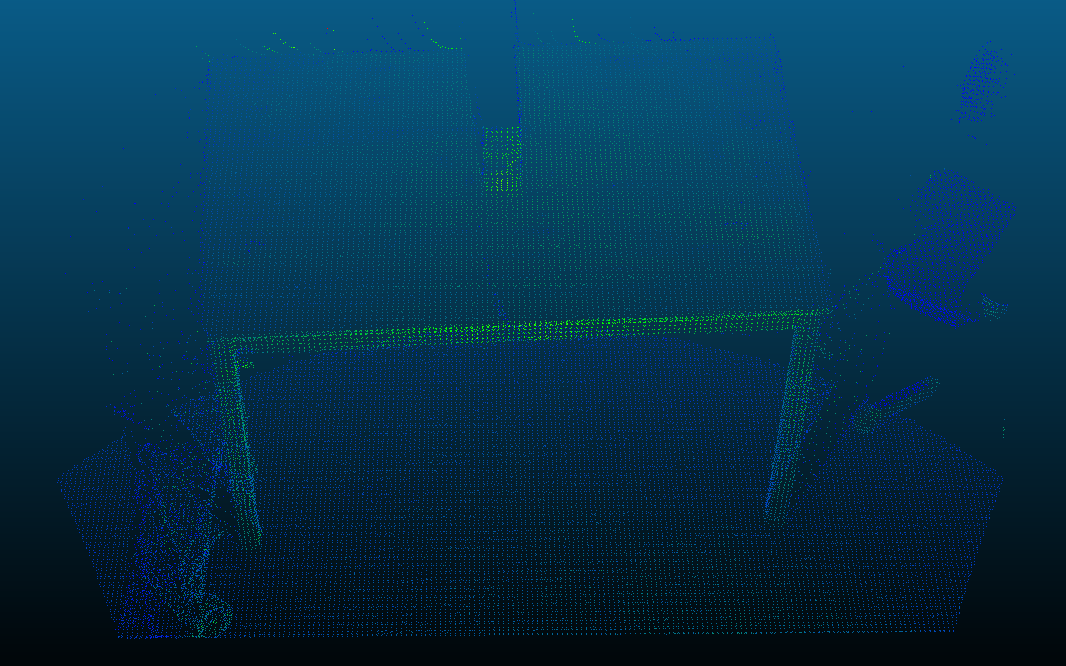
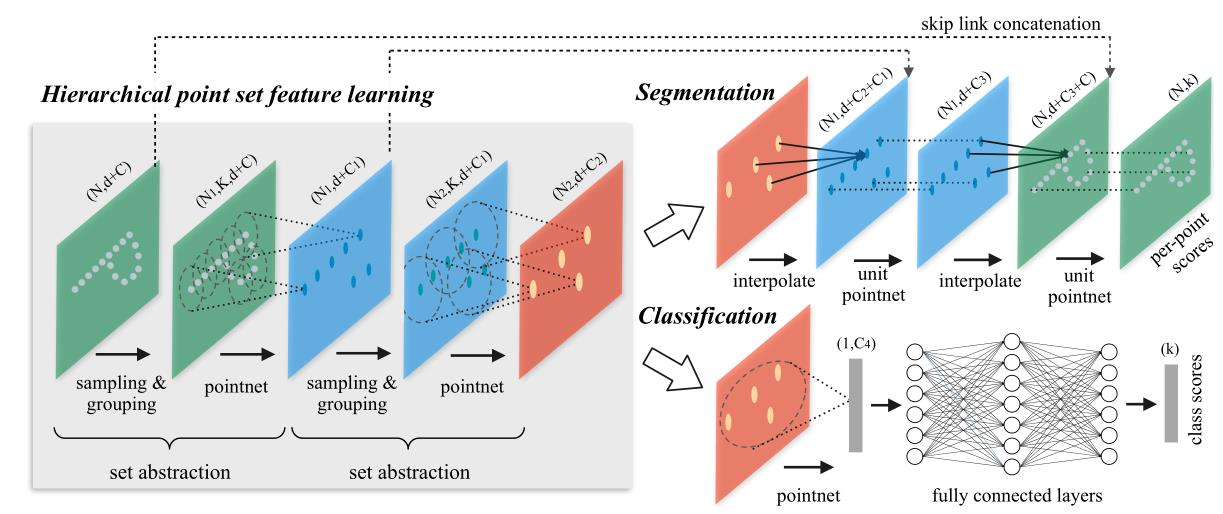
复现PointNet++(语义分割网络):Windows + PyTorch + S3DIS语义分割 + 代码
一、平台
Windows 10
GPU RTX 3090 CUDA 11.1 cudnn 8.9.6
Python 3.9
Torch 1.9.1 cu111
所用的原始代码:https://github.com/yanx27/Pointnet_Pointnet2_pytorch
二、数据
Stanford3dDataset_v1.2_Aligned_Version
三、代码
分享给有需要的人…
点云直通滤波(附python open3d 代码)
定义了一个名为pass_through的函数,用于根据指定的过滤值名称(filter_value_name)对点云数据进行过滤。函数接受四个参数:点云数据(pcd),最小限制(limit_min)和最大限制(limit_max)以及过滤值名称(filter_value_name)。
在函数内部,首先将点云数据转换为NumPy数…
Halcon中的一些3D算子
一、记录一些Halcon里的关于3D的算子
1.read_object_model_3d 从文件读取一个3d模型
如下图,读的一个ply文件出来是个3d点云模型 2.visualize_object_model_3d 交互式展示3d模型
即上个算子读出来后,通过这个算子可以把3d模型显示出来旋转、平移&am…
PCL点云处理之点云重建为Mesh模型并保存到PLY文件 ---方法二 (二百一十一)
PCL点云处理之点云重建为Mesh模型并保存到PLY文件 ---方法二 (二百一十一) 一、算法介绍二、算法实现1.代码2.效果一、算法介绍
离散点云重建为mesh网格模型,并保存到PLY文件中,用于其他软件打开查看,代码非常简短,复制粘贴即可迅速上手使用,具体参数根据自己的点云数据…
01 点云中的NAN点
一、NAN点
在点云中,NAN(Not a Number)表示一个无效的数字或值,通常是由于数据输入错误、计算错误或其他问题导致的。NAN点可能表示一个不存在的点、一个超出点云范围的点、一个无效的坐标值等。
由于NAN点在数学和计算机科学中都是特殊的数值…

C++ PCL点云局部颜色变换
程序示例精选 C PCL点云局部颜色变换 如需安装运行环境或远程调试,见文章底部个人QQ名片,由专业技术人员远程协助! 前言
这篇博客针对《C PCL点云局部颜色变换》编写代码,代码整洁,规则,易读。 学习与应用…
发票信息批量提取到 excel 软件 6.0
6.0更新 可以用支付宝在线支付购买次数了,终于不用每次我手动给用户发次数码了。。泪 朋友圈或微信人数大于200的群内宣传转发公众号文章可以获得高级识别次数码50张 高级识别可以试用了 增加了一个简单的使用说明 修正了一些其他的小bug 5.2更新 发票批量识别…
![[点云分割] 欧式距离分割](https://img-blog.csdnimg.cn/c09cd22e2f764897a34e0bcc2871975e.png)
[点云分割] 欧式距离分割
效果: 代码:
#include <iostream>
#include <chrono>#include <pcl/ModelCoefficients.h> // 模型系数的定义
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h> // 各种点云数据类型
#include <pcl/sample_c…
点云从入门到精通技术详解100篇-基于深度学习的3D点云焊点缺陷检测(续)
目录
3.2 激光雷达及其原理
3.2.1 激光雷达概述
3.2.2 激光雷达类型及原理
3.3 双目视觉采集系统的搭建</
sklearn随机森林 测试 路面点云分类
一、特征5个坐标 坐标-特征-类别 训练数据 二、模型训练
记录分享给有需要的人,代码质量勿喷
import numpy as np
import pandas as pd
import joblib#region 1 读取数据
dir D:\\py\\RandomForest\\
filename1 trainRS
filename2 .csv
path dirfilename1file…
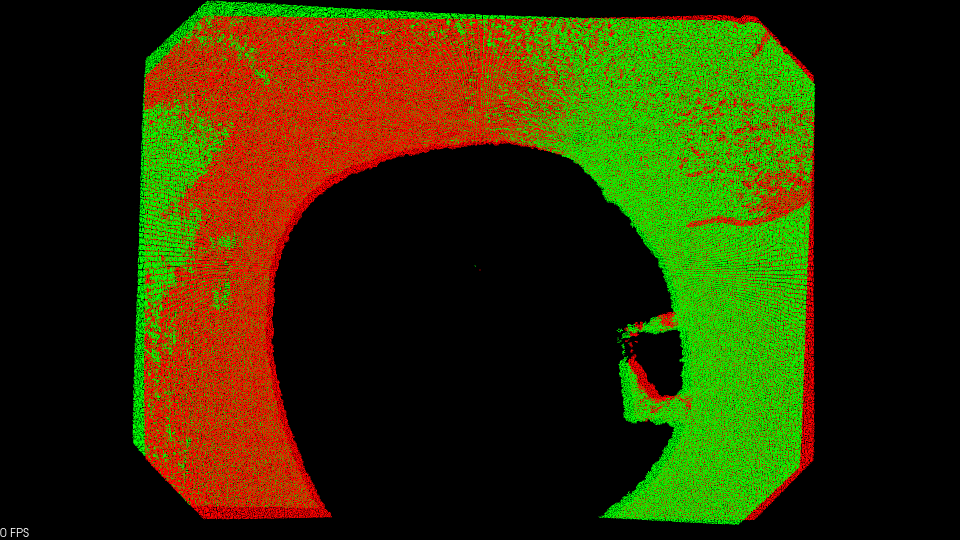
【PCL】(三十四)基于八叉树的点云空间变化检测
(三十四)基于八叉树的点云空间变化检测
octree_change_detection.cpp
#include <pcl/point_cloud.h>
#include <pcl/octree/octree_pointcloud_changedetector.h>#include <iostream>
#include <vector>
#include <ctime&g…
CloudCompare打开pcd文件
Ubuntu下CloudCompare稳定版本无法打开pcd点云文件,切换到edge版本即可
$ sudo snap refresh --edge cloudcompare感谢rjanvier在github上的回答 附录:
1、Ubuntu下安装CloudCompare: 在CloudCompare主页下载相应安装包
2、如果你有文件夹…

1、点云open3d初学(数据读取)
仅仅作为学习的记录,不喜勿喷。
(1)单条数据读取
import open3d as o3d
print("->正在加载一条点云数据... ")
pcd o3d.io.read_point_cloud("EaglePointCloud.ply")
print("->正在可视化点云") o…
稳定币套利案例解析一 两个疑点
交易时间 2022.01.27 获利 10W ust
文章链接 :
Web3.0笔记:[DeFi笔记] 一种稳定币套利策略如何在没有资本的情况下在 4 个月内悄悄赚取 1.13 亿美元的利润10 赞同 4 评论文章编辑 流程如下: 交易者从 Degenbox 借了 243,098.235…
C# 读取pcd、ply点云文件数据
最近研究了下用pcl读取点云数据,又做了个C#的dll,方便读取,同样这个dll基于pcl 最新版本1.13.1版本开发。 上次做的需要先得到点云长度,再获取数据。这次这个定义了一个PointCloudXYZ类来存数据。将下面的dll拷贝到可执行目录下&a…
PCL 最小二乘法拟合平面(SVD)
文章目录 一、简介1.1最小二乘法拟合平面1.2 SVD角度二、实现代码三、实现效果参考资料一、简介
1.1最小二乘法拟合平面 之前我们使用过最为经典的方式对平面进行了最小二乘拟合(点云最小二乘法拟合平面),其推导过程如下所示: 仔细观察一下可以发现
MATLAB 点与三角形的相对位置判断 (33)
MATLAB 点与三角形的相对位置判断 (33) 一、点在三角形的内外判断二、点在三角形的边上判断一、点在三角形的内外判断
返回1代表在内部,返回0代表在外部
具体效果可以自己调整P的坐标进行查看,这里要注意,如果点在边上,下面代码会将该点判断为在三角形内部,所以还是要…
Python点云处理(十七)点云地面点提取——基于格网算法
目录 0 简述1 算法流程2 优缺点3 实现4 效果5 结语0 简述
提取地面点是点云数据分析和处理中的重要任务,而点云格网法是一种常用的地面点提取方法。点云格网法(Grid-based Method),通过将点云数据划分为网格单元,根据高程值分析来实现地面点的提取。 1 算法流程
步骤1:…
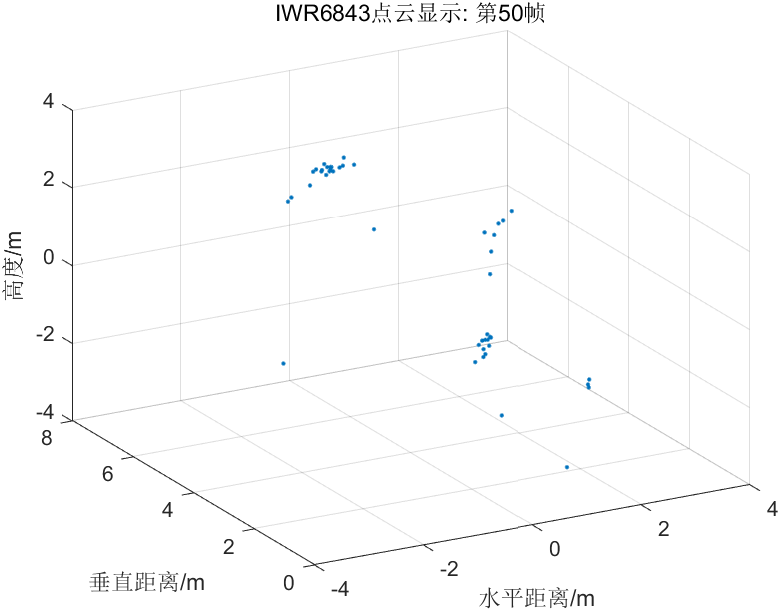
毫米波雷达4D点云生成(基于实测数据)
本期文章分享TI毫米波雷达实测4D点云生成的代码,包含距离、速度、水平角度、俯仰角度,可用于日常学习。
处理流程包含:数据读取和解析、MTI、距离估计、速度估计、非相干累积、2D-CFAR、水平角估计、俯仰角估计、点云生成、坐标转换等内容。…
凸包问题的GRAHAM-SCAN解法 open3d c++ 代码
使用了Open3D库进行点云处理和可视化。下面是代码的大致解释: 引入必要的头文件和命名空间: 定义了三个函数: ComputeTriangleDirArea:计算带符号三角形的面积。Compute2Ddistance:计算两点之间的平面距离。GetConvexHullByGrahamScan:通过Graham Scan方法计算凸包点集。…
PCL点云处理之基于强度特征的SIFT关键点提取法 (二百一十五)
PCL点云处理之基于强度特征的SIFT关键点提取法 (二百一十五) 一、算法介绍二、具体实现1.代码2.效果一、算法介绍
继续SIFT关键点的提取介绍,之前已经基于高程和颜色分别提取了关键点,这里是基于强度信息,若遇到文件无法读取强度问题,请参考上一篇博文,下面是具体的实现…
【PCL】(七) 点云的法线估计
文章目录 (七) 法线估计使用近邻点估计法线利用积分图像估计法线 (七) 法线估计
点云样例数据: https://github.com/PointCloudLibrary/pcl/raw/master/test/table_scene_mug_stereo_textured.pcd
使用近邻点估计法线…
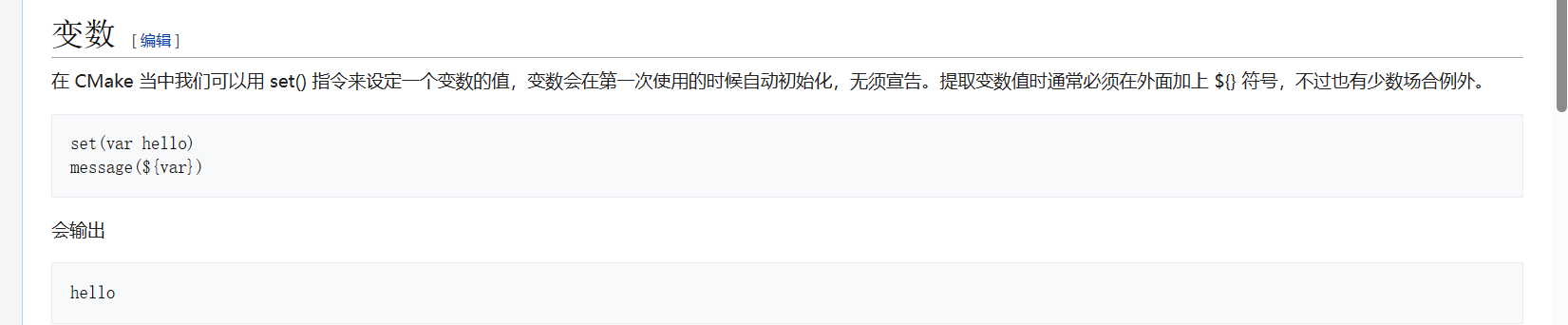
【PCL】(二)CMake编译
(二)编译
将以下代码写到pcd_write.cpp中,并放到项目/PATH/TO/MY/GRAND/PROJECT/project中。 #include <iostream>#include <pcl/io/pcd_io.h>#include <pcl/point_types.h>intmain (){pcl::PointCloud<pcl::PointXYZ&…
‘open3d.open3d.geometry.PointCloud‘ object has no attribute ‘voxel_down_sample‘
scene_cloud open3d.geometry.PointCloud()
scene_cloud.points open3d.utility.Vector3dVector(scene_points)
scene_cloud scene_cloud.voxel_down_sample(voxel_size) 执行上面代码第三句报错,出现了下面这个错误:
AttributeError: open3d.open…
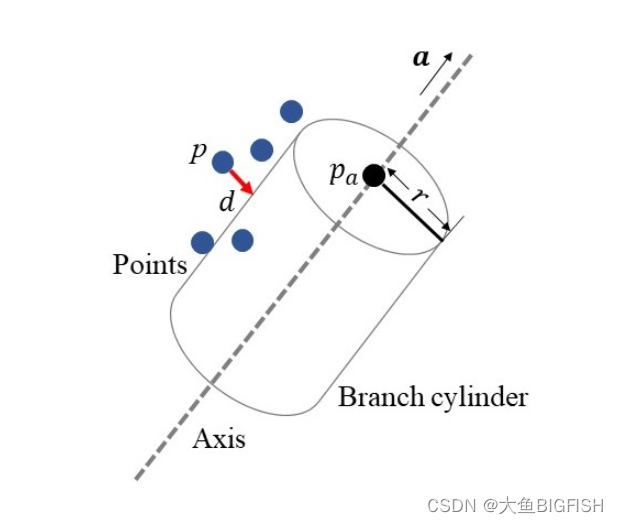
PCL 非线性最小二乘法拟合圆柱
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 这里通过非线性最小二乘的方法来实现圆柱体的拟合,具体的计算过程如下所述: 图中, p p p为输入数据的点位置,求解的参数为柱体的轴向向量 a

【PCL】—— 点云滤波
文章目录 直通滤波降采样使用统计滤波(statisticalOutlierRemoval)移除离群点使用条件滤波(ConditionalRemoval)或 半径滤波(RadiusOutlinerRemoval)移除离群点 在获取点云数据时,由于设备精度&…
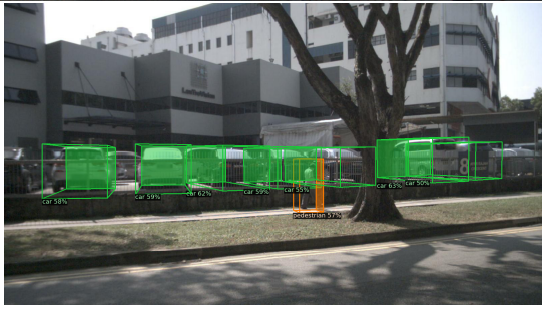
【论文解读】单目3D目标检测 DD3D(ICCV 2021)
本文分享单目3D目标检测,DD3D 模型的论文解读,了解它的设计思路,论文核心观点,模型结构,以及效果和性能。 一、DD3D简介
DD3D是一种端到端、单阶段的单目3D目标检测方法,它在训练时用到了点云数据…
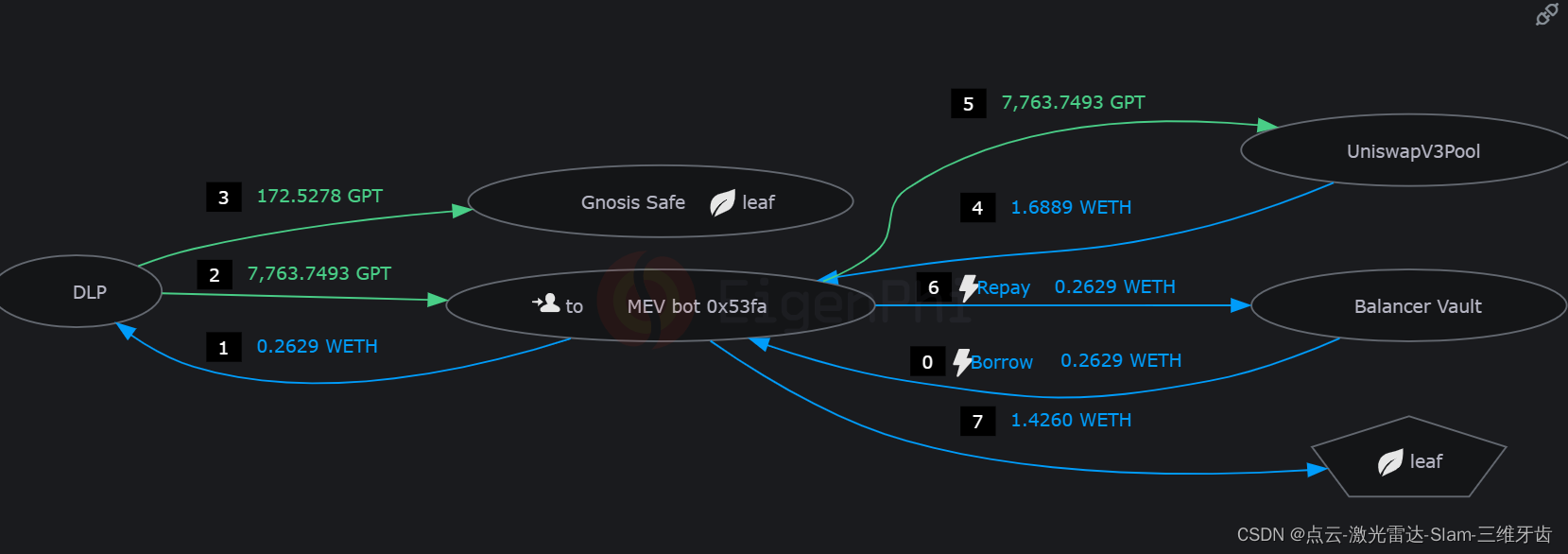
eth 交易案例分析9
交易hash: 先用0.26eth买入了多个GPT,然后用这多个GPT 在uniswap3 兑换了1.69 个eth, 疑问点:买入的 DLP 什么意思?
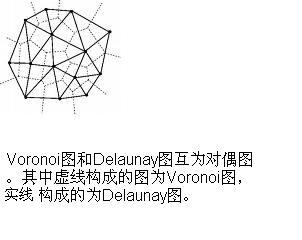
Delaunay三角化
点集的三角剖分(Triangulation),对数值分析(比如有限元分析)以及图形学来说,都是极为重要的一项预处理技术。尤其是Delaunay三角剖分,由于其独特性,关于点集的很多种几何图都和Delau…
实现了一个ROS节点,用于接收gps rtk 的UDP数据并将其转发为ROS节点消息
代码实现了一个ROS节点,用于接收UDP数据并将其转发为ROS消息。下面是对代码的简单解释: 首先,导入了必要的ROS和Python库,包括rospy、sensor_msgs.msg和socket等。 在main函数中,初始化了ROS节点,并创建了一个rospy.Publisher对象nmea_pub,用于发布NavSatFix类型的消息。…
Open3D 点云与模型ICP配准(Python,详细步骤版本二)
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 这是一个很有趣的功能,在真正进入主题之前,让我们先回顾一下点云与点云ICP算法的过程,如下图所示: (1)挑选发生重叠的点云子集,这一步如果原始点云数据量比较巨大,一般会对原始点云进行下采样操作。 (2)匹…

【GlobalMapper精品教程】059:基于las点云创建数字高程地形并二三维着色显示
本文讲述在globalmapper免费中文版中基于地形点云las数据创建数字高程地形、数字高程二三维联动可视化并进行数字高程着色显示。 文章目录 一、加载地形点云las数据二、创建数字高程地形三、数字高程二三维联动可视化四、数字高程着色显示相关阅读:ArcGIS实验教程——实验二十…
【PCL】(十)使用StatisticalOutlierRemove滤波器除去异常点
(十)使用StatisticalOutlierRemove滤波器删除异常点
以下代码实现使用StatisticalOutlierRemove去去除点云的异常点。 statistical_removal.cpp
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#inc…
Python点云处理(十八)点云地面点提取——基于法向量算法
目录 0 简述1 算法流程2 应用领域3 优缺点4 算法优化5 代码实现6 代码结果0 简述
基于法向量的点云地面点提取算法主要依靠点云中点的法向量信息来进行分类。地面点通常具有较平坦的表面,即法向量与垂直于地面的方向接近。因此,该算法首先计算每个点的法向量,然后通过判断法…
怎么实现批量文本txt转音频wav
随着人工智能技术的不断发展,语音合成技术也得到了广泛应用。其中,文本转语音(Text-to-Speech,TTS)技术是语音合成技术中的重要一环。在过去的几年中,深度学习网络在TTS领域取得了显著的进展,并…
深度学习——3D点云
深度学习点云综述文章 Deep Learning for 3D Point Clouds: A Survey中文翻译 - lakaka - 博客园 (cnblogs.com) 一文尽览 | 首篇Transformer在3D点云中的应用综述(检测/跟踪/分割/降噪/补全) - 知乎 (zhihu.com) 物体三维表达方式 点云应用 点云处理任务…

求解平面上物体的有向3d包围盒
算法流程: (1)点云下采样(体素滤波); (2)ransac算法分割拟合地面平面; (3)裁剪工作区域(指定空间中四个点,裁剪点云只保留…
CV计算机视觉每日开源代码Paper with code速览-2023.11.17
点击CV计算机视觉,关注更多CV干货
论文已打包,点击进入—>下载界面
点击加入—>CV计算机视觉交流群
1.【点云分割】(CVPR2023)Center Focusing Network for Real-Time LiDAR Panoptic Segmentation 论文地址:…