💡💡💡本文主要内容:详细介绍了无人机视角水稻杂草识别检测整个过程,从数据集到训练模型到结果可视化分析。
博主简介
AI小怪兽,YOLO骨灰级玩家,1)YOLOv5、v7、v8优化创新,轻松涨点和模型轻量化;2)目标检测、语义分割、OCR、分类等技术孵化,赋能智能制造,工业项目落地经验丰富;

原创自研系列, 2024年计算机视觉顶会创新点
《YOLOv8原创自研》
《YOLOv5原创自研》
《YOLOv7原创自研》
23年最火系列,内涵80+优化改进篇,涨点小能手,助力科研,好评率极高
《YOLOv8魔术师》
《YOLOv7魔术师》
《RT-DETR魔术师》
应用系列篇:
《YOLO小目标检测》
《深度学习工业缺陷检测》
《YOLOv8-Pose关键点检测》
1.无人机视角水稻杂草识别检测介绍
“精准农业航空”中基于遥感分析的精准施药为解决农药过量施用问题提供了一种新思路。精准施药的首要任务是获取水稻田的遥感图像并分析其中的杂草分布状况,得到网格形状的杂草分布图。水稻田图像中水稻及杂草颜色相近,若依据图像识别其差异,则要求遥感图像具有较高的空间分辨率。近年来无人机低空遥感因操作简单、节省人力物力并可获得高分辨率影像的优势为农作物分类调查提供了新思路,相比传统卫星影像,具有获取方式更灵活、时效高等特点,在农情监测、精准农业等领域得到越来越多的应用。
1.1数据集介绍
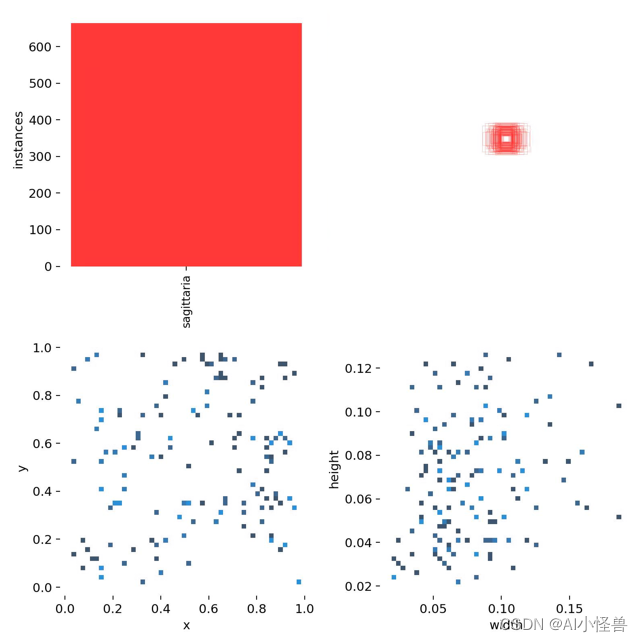
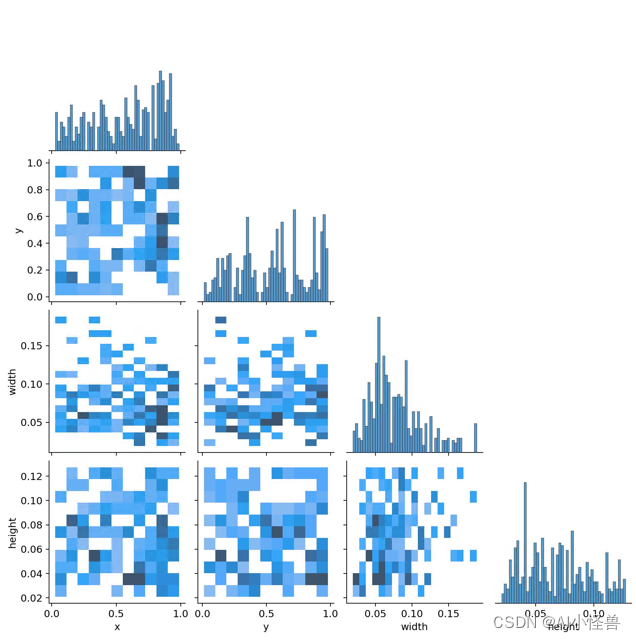
数据集大小221张,类别sagittaria
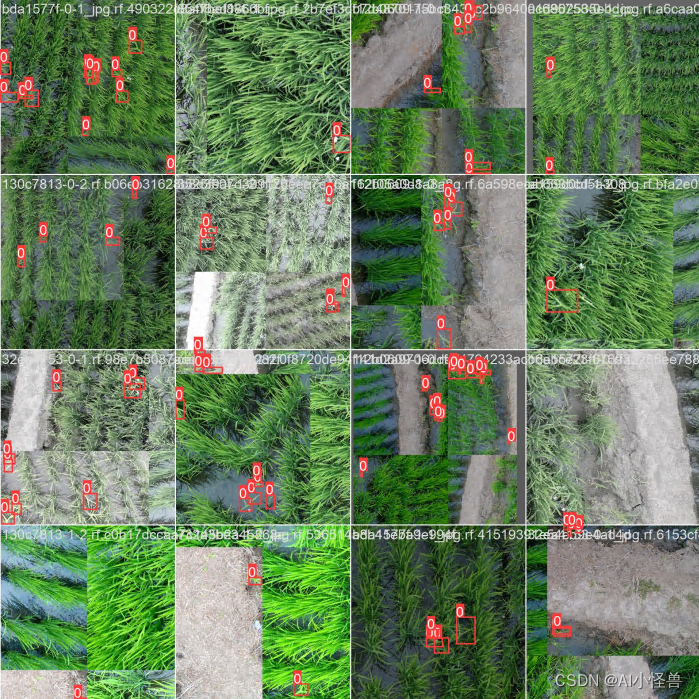
下图可以看出,水稻杂草检测为小目标检测,长宽占比较小。
2.基于YOLOv5的水稻杂草识别检测
2.1 修改sagittaria.yaml
train: ./data/sagittaria_v1_voc/trainval.txt
val: ./data/sagittaria_v1_voc/test.txt
# number of classes
nc: 1
# class names
names: ["sagittaria"]2.2 修改train.py
def parse_opt(known=False):
parser = argparse.ArgumentParser()
parser.add_argument("--weights", type=str, default=ROOT / "weights/yolov5s.pt", help="initial weights path")
parser.add_argument("--cfg", type=str, default="models/yolov5s.yaml", help="model.yaml path")
parser.add_argument("--data", type=str, default=ROOT / "data/sagittaria.yaml", help="dataset.yaml path")
parser.add_argument("--hyp", type=str, default=ROOT / "data/hyps/hyp.scratch-low.yaml", help="hyperparameters path")
parser.add_argument("--epochs", type=int, default=100, help="total training epochs")
parser.add_argument("--batch-size", type=int, default=16, help="total batch size for all GPUs, -1 for autobatch")
parser.add_argument("--imgsz", "--img", "--img-size", type=int, default=640, help="train, val image size (pixels)")
parser.add_argument("--rect", action="store_true", help="rectangular training")
parser.add_argument("--resume", nargs="?", const=True, default=False, help="resume most recent training")
parser.add_argument("--nosave", action="store_true", help="only save final checkpoint")
parser.add_argument("--noval", action="store_true", help="only validate final epoch")
parser.add_argument("--noautoanchor", action="store_true", help="disable AutoAnchor")
parser.add_argument("--noplots", action="store_true", help="save no plot files")
parser.add_argument("--evolve", type=int, nargs="?", const=300, help="evolve hyperparameters for x generations")
parser.add_argument(
"--evolve_population", type=str, default=ROOT / "data/hyps", help="location for loading population"
)
parser.add_argument("--resume_evolve", type=str, default=None, help="resume evolve from last generation")
parser.add_argument("--bucket", type=str, default="", help="gsutil bucket")
parser.add_argument("--cache", type=str, nargs="?", const="ram", help="image --cache ram/disk")
parser.add_argument("--image-weights", action="store_true", help="use weighted image selection for training")
parser.add_argument("--device", default="1", help="cuda device, i.e. 0 or 0,1,2,3 or cpu")
parser.add_argument("--multi-scale", action="store_true", help="vary img-size +/- 50%%")
parser.add_argument("--single-cls", action="store_true", help="train multi-class data as single-class")
parser.add_argument("--optimizer", type=str, choices=["SGD", "Adam", "AdamW"], default="SGD", help="optimizer")
parser.add_argument("--sync-bn", action="store_true", help="use SyncBatchNorm, only available in DDP mode")
parser.add_argument("--workers", type=int, default=0, help="max dataloader workers (per RANK in DDP mode)")
parser.add_argument("--project", default=ROOT / "runs/train", help="save to project/name")
parser.add_argument("--name", default="exp", help="save to project/name")
parser.add_argument("--exist-ok", action="store_true", help="existing project/name ok, do not increment")
parser.add_argument("--quad", action="store_true", help="quad dataloader")
parser.add_argument("--cos-lr", action="store_true", help="cosine LR scheduler")
parser.add_argument("--label-smoothing", type=float, default=0.0, help="Label smoothing epsilon")
parser.add_argument("--patience", type=int, default=100, help="EarlyStopping patience (epochs without improvement)")
parser.add_argument("--freeze", nargs="+", type=int, default=[0], help="Freeze layers: backbone=10, first3=0 1 2")
parser.add_argument("--save-period", type=int, default=-1, help="Save checkpoint every x epochs (disabled if < 1)")
parser.add_argument("--seed", type=int, default=0, help="Global training seed")
parser.add_argument("--local_rank", type=int, default=-1, help="Automatic DDP Multi-GPU argument, do not modify")
# Logger arguments
parser.add_argument("--entity", default=None, help="Entity")
parser.add_argument("--upload_dataset", nargs="?", const=True, default=False, help='Upload data, "val" option')
parser.add_argument("--bbox_interval", type=int, default=-1, help="Set bounding-box image logging interval")
parser.add_argument("--artifact_alias", type=str, default="latest", help="Version of dataset artifact to use")
# NDJSON logging
parser.add_argument("--ndjson-console", action="store_true", help="Log ndjson to console")
parser.add_argument("--ndjson-file", action="store_true", help="Log ndjson to file")
return parser.parse_known_args()[0] if known else parser.parse_args()
2.3 结果可视化分析
YOLOv5s summary: 157 layers, 7012822 parameters, 0 gradients, 15.8 GFLOPs
Class Images Instances P R mAP50 mAP50-95: 100%|██████████| 1/1 [00:02<00:00, 2.82s/it]
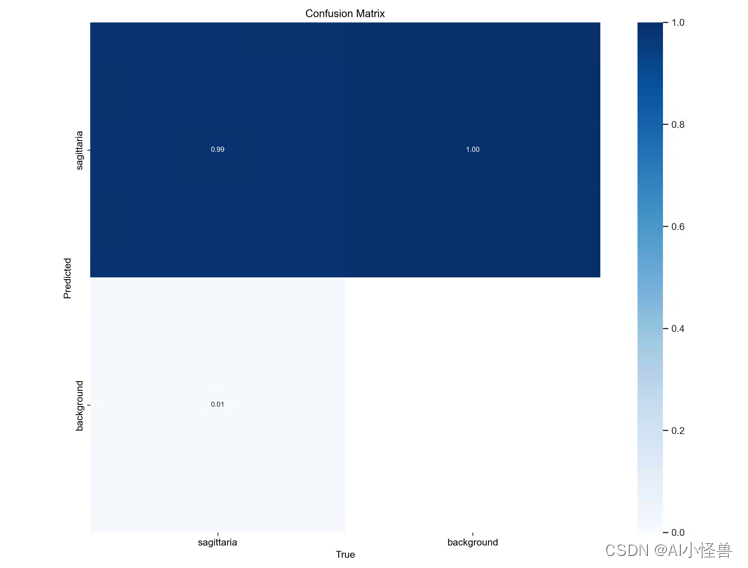
all 23 81 0.996 0.951 0.987 0.812confusion_matrix.png文件是一个混淆矩阵的可视化图像,用于展示模型在不同类别上的分类效果。混淆矩阵是一个n×n的矩阵,其中n为分类数目,矩阵的每一行代表一个真实类别,每一列代表一个预测类别,矩阵中的每一个元素表示真实类别为行对应的类别,而预测类别为列对应的类别的样本数。
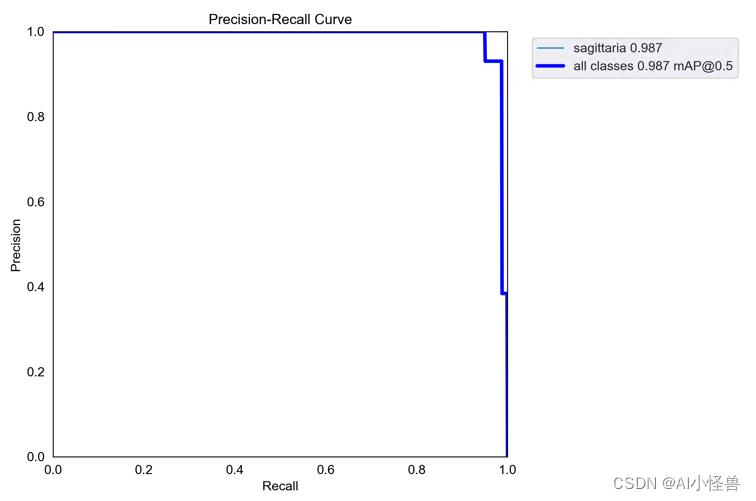
PR_curve.png
PR曲线中的P代表的是precision(精准率),R代表的是recall(召回率),其代表的是精准率与召回率的关系,一般情况下,将recall设置为横坐标,precision设置为纵坐标。PR曲线下围成的面积即AP,所有类别AP平均值即Map
预测结果:

关注下方名片,即可获取源码。