目录
效果
模型信息
项目
代码
下载
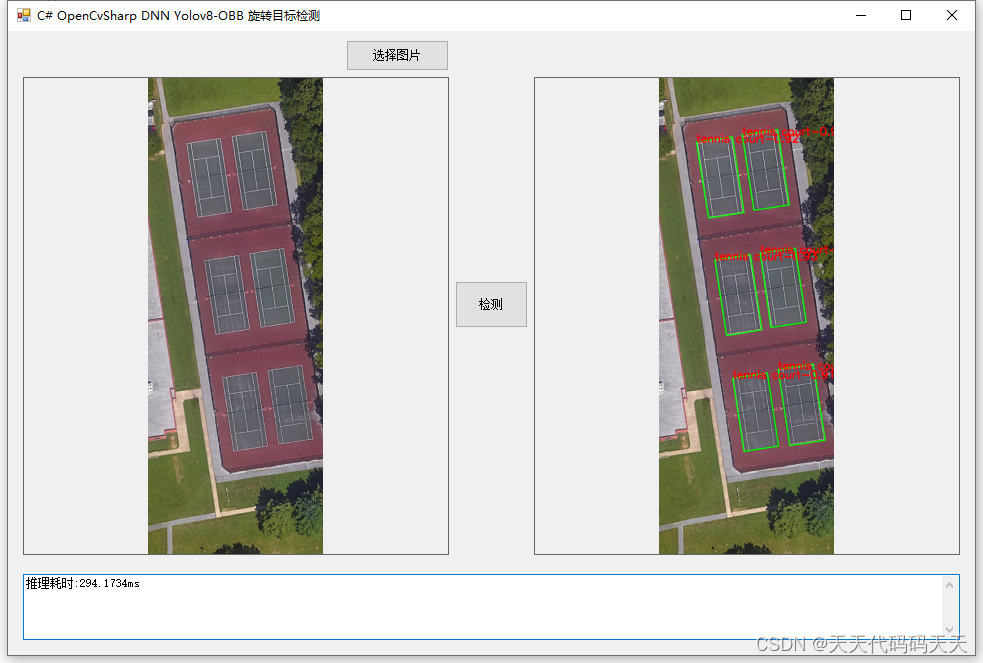
C# OpenCvSharp DNN Yolov8-OBB 旋转目标检测
效果
模型信息
Model Properties
-------------------------
date:2024-02-26T08:38:44.171849
description:Ultralytics YOLOv8s-obb model trained on runs/DOTAv1.0-ms.yaml
author:Ultralytics
task:obb
license:AGPL-3.0 https://ultralytics.com/license
version:8.1.18
stride:32
batch:1
imgsz:[640, 640]
names:{0: 'plane', 1: 'ship', 2: 'storage tank', 3: 'baseball diamond', 4: 'tennis court', 5: 'basketball court', 6: 'ground track field', 7: 'harbor', 8: 'bridge', 9: 'large vehicle', 10: 'small vehicle', 11: 'helicopter', 12: 'roundabout', 13: 'soccer ball field', 14: 'swimming pool'}
---------------------------------------------------------------
Inputs
-------------------------
name:images
tensor:Float[1, 3, 640, 640]
---------------------------------------------------------------
Outputs
-------------------------
name:output0
tensor:Float[1, 20, 8400]
---------------------------------------------------------------
项目
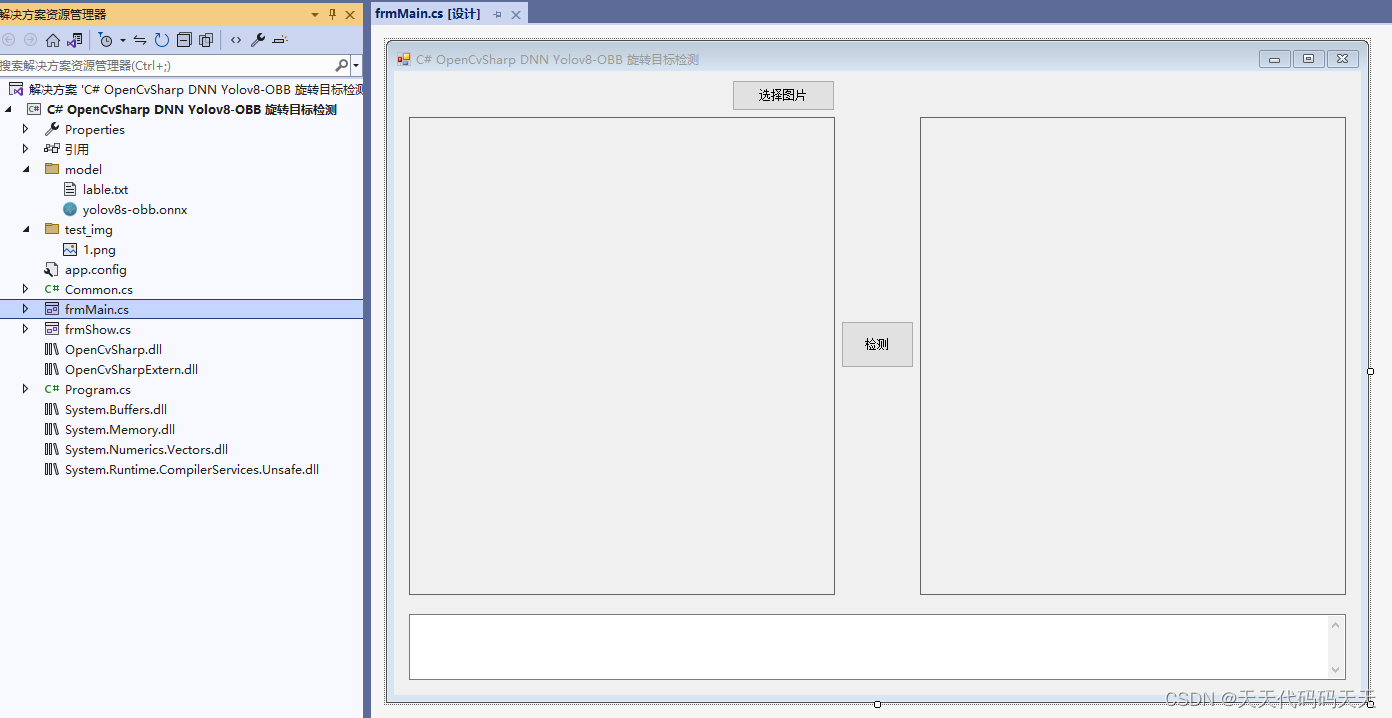
代码
using OpenCvSharp;
using OpenCvSharp.Dnn;
using System;
using System.Collections.Generic;
using System.Drawing;
using System.IO;
using System.Linq;
using System.Windows.Forms;
namespace OpenCvSharp_DNN_Demo
{
public partial class frmMain : Form
{
public frmMain()
{
InitializeComponent();
}
string fileFilter = "*.*|*.bmp;*.jpg;*.jpeg;*.tiff;*.tiff;*.png";
string image_path = "";
DateTime dt1 = DateTime.Now;
DateTime dt2 = DateTime.Now;
string modelpath;
string classer_path;
List<string> class_names;
Net opencv_net;
Mat BN_image;
Mat image;
Mat result_image;
string[] class_lables;
private void button1_Click(object sender, EventArgs e)
{
OpenFileDialog ofd = new OpenFileDialog();
ofd.Filter = fileFilter;
if (ofd.ShowDialog() != DialogResult.OK) return;
pictureBox1.Image = null;
pictureBox2.Image = null;
textBox1.Text = "";
image_path = ofd.FileName;
pictureBox1.Image = new Bitmap(image_path);
image = new Mat(image_path);
}
private void Form1_Load(object sender, EventArgs e)
{
modelpath = "model/yolov8s-obb.onnx";
classer_path = "model/lable.txt";
opencv_net = CvDnn.ReadNetFromOnnx(modelpath);
List<string> str = new List<string>();
StreamReader sr = new StreamReader(classer_path);
string line;
while ((line = sr.ReadLine()) != null)
{
str.Add(line);
}
class_lables = str.ToArray();
image_path = "test_img/1.png";
pictureBox1.Image = new Bitmap(image_path);
}
private void button2_Click(object sender, EventArgs e)
{
if (image_path == "")
{
return;
}
textBox1.Text = "检测中,请稍等……";
pictureBox2.Image = null;
button2.Enabled = false;
Application.DoEvents();
image = new Mat(image_path);
//图片缩放
image = new Mat(image_path);
int max_image_length = image.Cols > image.Rows ? image.Cols : image.Rows;
Mat max_image = Mat.Zeros(new OpenCvSharp.Size(max_image_length, max_image_length), MatType.CV_8UC3);
Rect roi = new Rect(0, 0, image.Cols, image.Rows);
image.CopyTo(new Mat(max_image, roi));
float[] result_array;
float factor = (float)(max_image_length / 640.0);
// 将图片转为RGB通道
Mat image_rgb = new Mat();
Cv2.CvtColor(max_image, image_rgb, ColorConversionCodes.BGR2RGB);
Mat resize_image = new Mat();
Cv2.Resize(image_rgb, resize_image, new OpenCvSharp.Size(640, 640));
BN_image = CvDnn.BlobFromImage(resize_image, 1 / 255.0, new OpenCvSharp.Size(640, 640), new Scalar(0, 0, 0), true, false);
//配置图片输入数据
opencv_net.SetInput(BN_image);
//模型推理,读取推理结果
Mat[] outs = new Mat[1] { new Mat() };
string[] outBlobNames = opencv_net.GetUnconnectedOutLayersNames().ToArray();
dt1 = DateTime.Now;
opencv_net.Forward(outs, outBlobNames);
dt2 = DateTime.Now;
int num_proposal = outs[0].Size(1);
int nout = outs[0].Size(2);
if (outs[0].Dims > 2)
{
outs[0] = outs[0].Reshape(0, num_proposal);
}
Mat result_data = new Mat(20, 8400, MatType.CV_32F);
result_data = outs[0].T();
List<Rect2d> position_boxes = new List<Rect2d>();
List<int> class_ids = new List<int>();
List<float> confidences = new List<float>();
List<float> rotations = new List<float>();
// Preprocessing output results
for (int i = 0; i < result_data.Rows; i++)
{
Mat classes_scores = new Mat(result_data, new Rect(4, i, 15, 1));
OpenCvSharp.Point max_classId_point, min_classId_point;
double max_score, min_score;
// Obtain the maximum value and its position in a set of data
Cv2.MinMaxLoc(classes_scores, out min_score, out max_score,
out min_classId_point, out max_classId_point);
// Confidence level between 0 ~ 1
// Obtain identification box information
if (max_score > 0.25)
{
float cx = result_data.At<float>(i, 0);
float cy = result_data.At<float>(i, 1);
float ow = result_data.At<float>(i, 2);
float oh = result_data.At<float>(i, 3);
double x = (cx - 0.5 * ow) * factor;
double y = (cy - 0.5 * oh) * factor;
double width = ow * factor;
double height = oh * factor;
Rect2d box = new Rect2d();
box.X = x;
box.Y = y;
box.Width = width;
box.Height = height;
position_boxes.Add(box);
class_ids.Add(max_classId_point.X);
confidences.Add((float)max_score);
rotations.Add(result_data.At<float>(i, 19));
}
}
// NMS
int[] indexes = new int[position_boxes.Count];
CvDnn.NMSBoxes(position_boxes, confidences, 0.25f, 0.7f, out indexes);
List<RotatedRect> rotated_rects = new List<RotatedRect>();
for (int i = 0; i < indexes.Length; i++)
{
int index = indexes[i];
float w = (float)position_boxes[index].Width;
float h = (float)position_boxes[index].Height;
float x = (float)position_boxes[index].X + w / 2;
float y = (float)position_boxes[index].Y + h / 2;
float r = rotations[index];
float w_ = w > h ? w : h;
float h_ = w > h ? h : w;
r = (float)((w > h ? r : (float)(r + Math.PI / 2)) % Math.PI);
RotatedRect rotate = new RotatedRect(new Point2f(x, y), new Size2f(w_, h_), (float)(r * 180.0 / Math.PI));
rotated_rects.Add(rotate);
}
result_image = image.Clone();
for (int i = 0; i < indexes.Length; i++)
{
int index = indexes[i];
Point2f[] points = rotated_rects[i].Points();
for (int j = 0; j < 4; j++)
{
Cv2.Line(result_image, (OpenCvSharp.Point)points[j], (OpenCvSharp.Point)points[(j + 1) % 4], new Scalar(0, 255, 0), 2);
}
Cv2.PutText(result_image, class_lables[class_ids[index]] + "-" + confidences[index].ToString("0.00"),
(OpenCvSharp.Point)points[0], HersheyFonts.HersheySimplex, 0.8, new Scalar(0, 0, 255), 2);
}
pictureBox2.Image = new Bitmap(result_image.ToMemoryStream());
textBox1.Text = "推理耗时:" + (dt2 - dt1).TotalMilliseconds + "ms";
button2.Enabled = true;
}
private void pictureBox2_DoubleClick(object sender, EventArgs e)
{
Common.ShowNormalImg(pictureBox2.Image);
}
private void pictureBox1_DoubleClick(object sender, EventArgs e)
{
Common.ShowNormalImg(pictureBox1.Image);
}
}
}
using OpenCvSharp;
using OpenCvSharp.Dnn;
using System;
using System.Collections.Generic;
using System.Drawing;
using System.IO;
using System.Linq;
using System.Windows.Forms;
namespace OpenCvSharp_DNN_Demo
{
public partial class frmMain : Form
{
public frmMain()
{
InitializeComponent();
}
string fileFilter = "*.*|*.bmp;*.jpg;*.jpeg;*.tiff;*.tiff;*.png";
string image_path = "";
DateTime dt1 = DateTime.Now;
DateTime dt2 = DateTime.Now;
string modelpath;
string classer_path;
List<string> class_names;
Net opencv_net;
Mat BN_image;
Mat image;
Mat result_image;
string[] class_lables;
private void button1_Click(object sender, EventArgs e)
{
OpenFileDialog ofd = new OpenFileDialog();
ofd.Filter = fileFilter;
if (ofd.ShowDialog() != DialogResult.OK) return;
pictureBox1.Image = null;
pictureBox2.Image = null;
textBox1.Text = "";
image_path = ofd.FileName;
pictureBox1.Image = new Bitmap(image_path);
image = new Mat(image_path);
}
private void Form1_Load(object sender, EventArgs e)
{
modelpath = "model/yolov8s-obb.onnx";
classer_path = "model/lable.txt";
opencv_net = CvDnn.ReadNetFromOnnx(modelpath);
List<string> str = new List<string>();
StreamReader sr = new StreamReader(classer_path);
string line;
while ((line = sr.ReadLine()) != null)
{
str.Add(line);
}
class_lables = str.ToArray();
image_path = "test_img/1.png";
pictureBox1.Image = new Bitmap(image_path);
}
private void button2_Click(object sender, EventArgs e)
{
if (image_path == "")
{
return;
}
textBox1.Text = "检测中,请稍等……";
pictureBox2.Image = null;
button2.Enabled = false;
Application.DoEvents();
image = new Mat(image_path);
//图片缩放
image = new Mat(image_path);
int max_image_length = image.Cols > image.Rows ? image.Cols : image.Rows;
Mat max_image = Mat.Zeros(new OpenCvSharp.Size(max_image_length, max_image_length), MatType.CV_8UC3);
Rect roi = new Rect(0, 0, image.Cols, image.Rows);
image.CopyTo(new Mat(max_image, roi));
float[] result_array;
float factor = (float)(max_image_length / 640.0);
// 将图片转为RGB通道
Mat image_rgb = new Mat();
Cv2.CvtColor(max_image, image_rgb, ColorConversionCodes.BGR2RGB);
Mat resize_image = new Mat();
Cv2.Resize(image_rgb, resize_image, new OpenCvSharp.Size(640, 640));
BN_image = CvDnn.BlobFromImage(resize_image, 1 / 255.0, new OpenCvSharp.Size(640, 640), new Scalar(0, 0, 0), true, false);
//配置图片输入数据
opencv_net.SetInput(BN_image);
//模型推理,读取推理结果
Mat[] outs = new Mat[1] { new Mat() };
string[] outBlobNames = opencv_net.GetUnconnectedOutLayersNames().ToArray();
dt1 = DateTime.Now;
opencv_net.Forward(outs, outBlobNames);
dt2 = DateTime.Now;
int num_proposal = outs[0].Size(1);
int nout = outs[0].Size(2);
if (outs[0].Dims > 2)
{
outs[0] = outs[0].Reshape(0, num_proposal);
}
Mat result_data = new Mat(20, 8400, MatType.CV_32F);
result_data = outs[0].T();
List<Rect2d> position_boxes = new List<Rect2d>();
List<int> class_ids = new List<int>();
List<float> confidences = new List<float>();
List<float> rotations = new List<float>();
// Preprocessing output results
for (int i = 0; i < result_data.Rows; i++)
{
Mat classes_scores = new Mat(result_data, new Rect(4, i, 15, 1));
OpenCvSharp.Point max_classId_point, min_classId_point;
double max_score, min_score;
// Obtain the maximum value and its position in a set of data
Cv2.MinMaxLoc(classes_scores, out min_score, out max_score,
out min_classId_point, out max_classId_point);
// Confidence level between 0 ~ 1
// Obtain identification box information
if (max_score > 0.25)
{
float cx = result_data.At<float>(i, 0);
float cy = result_data.At<float>(i, 1);
float ow = result_data.At<float>(i, 2);
float oh = result_data.At<float>(i, 3);
double x = (cx - 0.5 * ow) * factor;
double y = (cy - 0.5 * oh) * factor;
double width = ow * factor;
double height = oh * factor;
Rect2d box = new Rect2d();
box.X = x;
box.Y = y;
box.Width = width;
box.Height = height;
position_boxes.Add(box);
class_ids.Add(max_classId_point.X);
confidences.Add((float)max_score);
rotations.Add(result_data.At<float>(i, 19));
}
}
// NMS
int[] indexes = new int[position_boxes.Count];
CvDnn.NMSBoxes(position_boxes, confidences, 0.25f, 0.7f, out indexes);
List<RotatedRect> rotated_rects = new List<RotatedRect>();
for (int i = 0; i < indexes.Length; i++)
{
int index = indexes[i];
float w = (float)position_boxes[index].Width;
float h = (float)position_boxes[index].Height;
float x = (float)position_boxes[index].X + w / 2;
float y = (float)position_boxes[index].Y + h / 2;
float r = rotations[index];
float w_ = w > h ? w : h;
float h_ = w > h ? h : w;
r = (float)((w > h ? r : (float)(r + Math.PI / 2)) % Math.PI);
RotatedRect rotate = new RotatedRect(new Point2f(x, y), new Size2f(w_, h_), (float)(r * 180.0 / Math.PI));
rotated_rects.Add(rotate);
}
result_image = image.Clone();
for (int i = 0; i < indexes.Length; i++)
{
int index = indexes[i];
Point2f[] points = rotated_rects[i].Points();
for (int j = 0; j < 4; j++)
{
Cv2.Line(result_image, (OpenCvSharp.Point)points[j], (OpenCvSharp.Point)points[(j + 1) % 4], new Scalar(0, 255, 0), 2);
}
Cv2.PutText(result_image, class_lables[class_ids[index]] + "-" + confidences[index].ToString("0.00"),
(OpenCvSharp.Point)points[0], HersheyFonts.HersheySimplex, 0.8, new Scalar(0, 0, 255), 2);
}
pictureBox2.Image = new Bitmap(result_image.ToMemoryStream());
textBox1.Text = "推理耗时:" + (dt2 - dt1).TotalMilliseconds + "ms";
button2.Enabled = true;
}
private void pictureBox2_DoubleClick(object sender, EventArgs e)
{
Common.ShowNormalImg(pictureBox2.Image);
}
private void pictureBox1_DoubleClick(object sender, EventArgs e)
{
Common.ShowNormalImg(pictureBox1.Image);
}
}
}
下载
源码下载