roslaunch realsense2_camera rs_camera. launch
roslaunch yolov8_ros yolo_v8. launch
launch文件如下,参数use_cpu设置为false,因为实际使用GPU加速,不是CPU跑,另外参数pub_topic是yolov8识别到目标后发布出来的物体在镜头中的位置,程序作了修改,直接给出目标物的中心位置,其中参数image_topic是订阅的节点话题,一定要与摄像头发布的实际话题名称对应上。 < ? xml version= "1.0" encoding= "utf-8" ? >
< launch>
< ! -- Load Parameter -- >
< param name= "use_cpu" value= "false" / >
< ! -- Start yolov8 and ros wrapper -- >
< node pkg= "yolov8_ros" type= "yolo_v8.py" name= "yolov8_ros" output= "screen" >
< param name= "weight_path" value= "$(find yolov8_ros)/weights/yolov8n.pt" / >
< param name= "image_topic" value= "/camera/color/image_raw" / >
< param name= "pub_topic" value= "/object_position" / >
< param name= "camera_frame" value= "camera_color_frame" / >
< param name= "visualize" value= "false" / >
< param name= "conf" value= "0.3" / >
< / node>
< / launch>
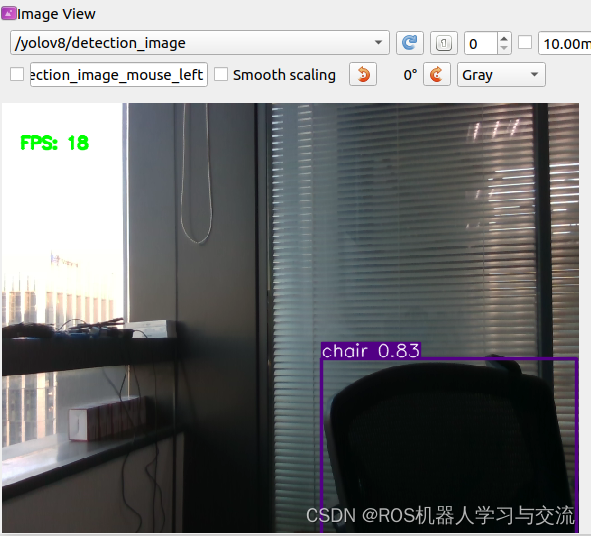
rqt_image_view