1.打开推流服务器
2.接收ros图像
3.ffmpeg命令推流
pushflow.cpp
// 1.包含头文件;
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/string.hpp"
#include <iostream>
#include <csignal>
#include <opencv4/opencv2/opencv.hpp>
#include <cv_bridge/cv_bridge.h>
#include <sensor_msgs/msg/image.hpp>
using namespace std::chrono_literals;
using std::placeholders::_1;
FILE *fp = nullptr;
// 3.定义节点类;
class MinimalSubscriber : public rclcpp::Node
{
public:
MinimalSubscriber(std::string name)
: Node(name)
{
// 3-1.创建订阅方;
//subscription_ = this->create_subscription<std_msgs::msg::String>("rtsptopic", 10, std::bind(&MinimalSubscriber::topic_callback, this, _1));
std::string rtspUrl = "rtsp://127.0.0.1:8554/test";
std::stringstream command;
command << "ffmpeg "
<< "-re "
<< "-f rawvideo "
<< "-vcodec rawvideo "
<< "-pix_fmt bgr24 "
<< "-s 1080x720 "
<< "-r 19 "
<< "-i - "
<< "-an "
<< "-q:v 1 "
//<<"-c:v libx264 "
<< "-f rtsp "
<< rtspUrl;//<<" "
//<< "-c copy";
fp = popen(command.str().c_str(),"w");
//if(fp!= nullptr){
subscription_ = this->create_subscription<sensor_msgs::msg::CompressedImage>("detectResultMatTopic", 10, std::bind(&MinimalSubscriber::topic_callback, this, _1));
//subscription_ = this->create_subscription<sensor_msgs::msg::CompressedImage>("pubImageTopic", 10, std::bind(&MinimalSubscriber::topic_callback, this, _1));
//pclose(fp);
// }
}
private:
rclcpp::Subscription<sensor_msgs::msg::CompressedImage>::SharedPtr subscription_;
// 3-2.处理订阅到的消息;
void topic_callback(const sensor_msgs::msg::CompressedImage::ConstPtr msg) const
{
cv_bridge::CvImagePtr cv_ptr_compressed = cv_bridge::toCvCopy(msg,sensor_msgs::image_encodings::BGR8);
cv::Mat imgCallback = cv_ptr_compressed->image;
cv::Mat des1080;
cv::resize(imgCallback, des1080, cv::Size(1080, 720), 0, 0, cv::INTER_NEAREST);
//cv::imshow("imgCallbackrtsp",des1080);
//cv::waitKey(1);
fwrite(des1080.data,sizeof(char),des1080.total()*des1080.elemSize(),fp);
}
};
int main(int argc, char * argv[])
{
// 2.初始化 ROS2 客户端;
rclcpp::init(argc, argv);
// 4.调用spin函数,并传入节点对象指针。
auto node = std::make_shared<MinimalSubscriber>("rtsp");
rclcpp::spin(node);
//rclcpp::init(argc, argv);
// 4.调用spin函数,并传入节点对象指针。
//auto node = std::make_shared<MinimalSubscriber>("detect");
//rclcpp::spin(node);
//rclcpp::spin(std::make_shared<MinimalSubscriber>());
// 5.释放资源;
//rclcpp::shutdown();
// 5.释放资源;
rclcpp::shutdown();
return 0;
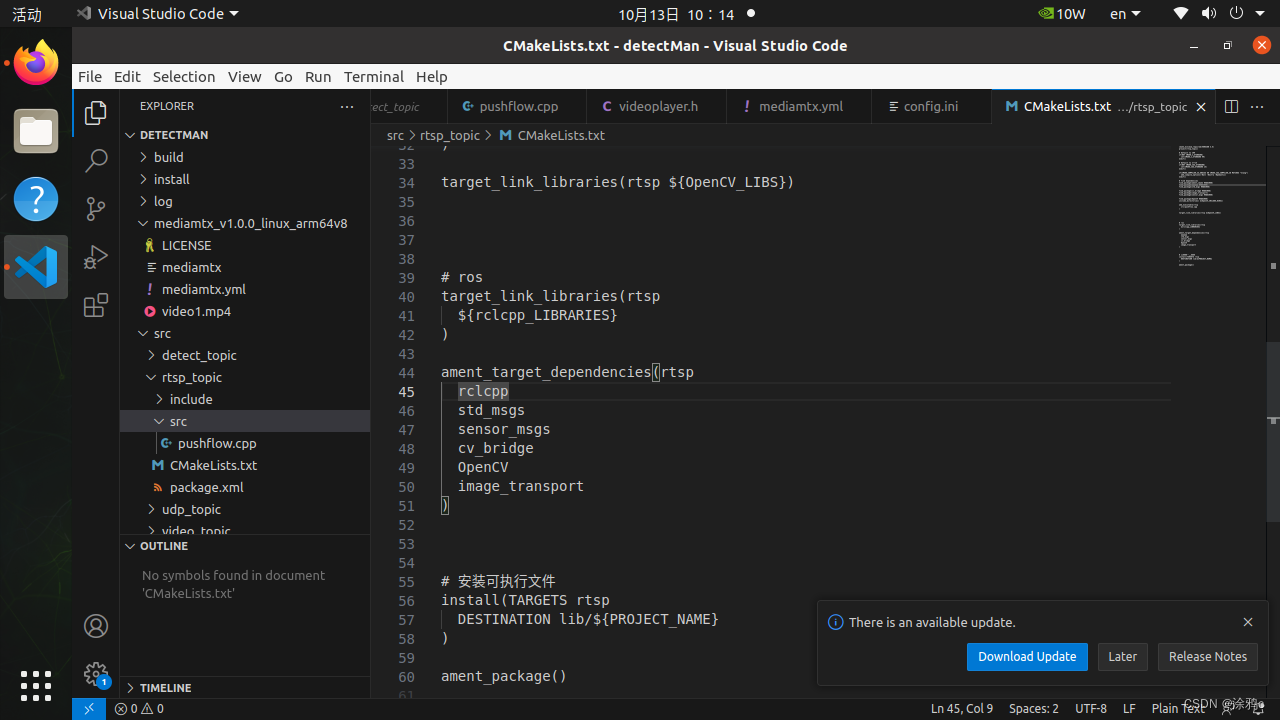
}CMakeLists.txt
cmake_minimum_required(VERSION 3.5)
project(rtsp_topic)
# Default to C99
if(NOT CMAKE_C_STANDARD)
set(CMAKE_C_STANDARD 99)
endif()
# Default to C++14
if(NOT CMAKE_CXX_STANDARD)
set(CMAKE_CXX_STANDARD 14)
endif()
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# find dependencies
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(std_msgs REQUIRED)
find_package(cv_bridge REQUIRED)
find_package(image_transport)
find_package(sensor_msgs REQUIRED)
find_package(OpenCV REQUIRED)
include_directories( ${OpenCV_INCLUDE_DIRS})
add_executable(rtsp
src/pushflow.cpp
)
target_link_libraries(rtsp ${OpenCV_LIBS})
# ros
target_link_libraries(rtsp
${rclcpp_LIBRARIES}
)
ament_target_dependencies(rtsp
rclcpp
std_msgs
sensor_msgs
cv_bridge
OpenCV
image_transport
)
# 安装可执行文件
install(TARGETS rtsp
DESTINATION lib/${PROJECT_NAME}
)
ament_package()
package.xml
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="3">
<name>rtsp_topic</name>
<version>0.0.0</version>
<description>TODO: Package description</description>
<maintainer email="jetson@todo.todo">jetson</maintainer>
<license>TODO: License declaration</license>
<buildtool_depend>ament_cmake</buildtool_depend>
<depend>rclcpp</depend>
<depend>std_msgs</depend>
<test_depend>ament_lint_auto</test_depend>
<test_depend>ament_lint_common</test_depend>
<export>
<build_type>ament_cmake</build_type>
</export>
</package>