网上有很多相关不错的操作demo,但自己在训练过程仍然遇到不少疑惑。因此,我这总结一下操作过程中所解决的问题。
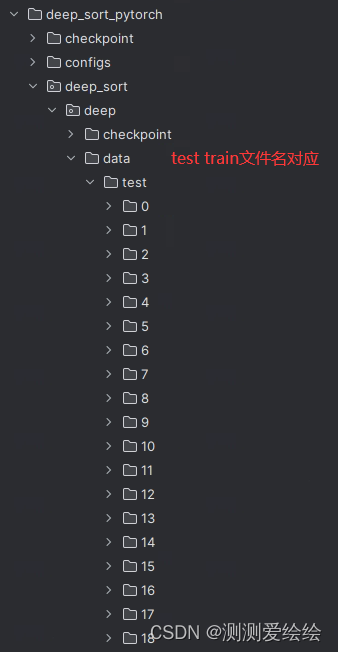
1、deepsort的训练集是否必须基于逐帧视频?
我经过尝试,发现非连续性的图像仍可以作为训练集。一个实例(如指定某个人、某辆车等)对应一个train\test文件夹即可。当然,逐帧效果更佳。
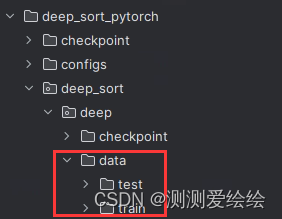
2、yolo训练的类型不止一个,该怎么办?
按照问题1中,每个类型都可以制作1个或多个实例(如类型0表示自行车,则可以有红色自行车、蓝色自行车等多个实例,类别1表示xxx,同理),全部都集中存放于train\test即可。
3、deepsort训练完成后,如何实现对自己视频中的目标进行跟踪?
将track.py相关参数进行修改即可,如下所示。注意,若yolo存在识别多个类别,则需要对应修改’–classes’中参数!!!
if __name__ == '__main__':
parser = argparse.ArgumentParser()
# 表示yolo训练得到的权重
parser.add_argument('--yolo_weights', type=str, default='yolov5/weights/best.pt', help='model.pt path')
# 表示训练得到的权重
parser.add_argument('--deep_sort_weights', type=str, default='deep_sort_pytorch/deep_sort/deep/checkpoint/ckpt.t7', help='ckpt.t7 path')
# 测试视频
parser.add_argument('--source', type=str, default='data/test.mp4', help='source')
parser.add_argument('--output', type=str, default='inference/output', help='output folder') # output folder
parser.add_argument('--img-size', type=int, default=640, help='inference size (pixels)')
parser.add_argument('--conf-thres', type=float, default=0.4, help='object confidence threshold')
parser.add_argument('--iou-thres', type=float, default=0.5, help='IOU threshold for NMS')
parser.add_argument('--fourcc', type=str, default='mp4v', help='output video codec (verify ffmpeg support)')
parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
# True表示显示、保存、存储结果
parser.add_argument('--show-vid', action='store_true', default=True,help='display tracking video results')
parser.add_argument('--save-vid', action='store_true',default=True, help='save video tracking results')
parser.add_argument('--save-txt', action='store_true',default=True, help='save MOT compliant results to *.txt')
# 表示跟踪所有类别,yolo训练类型共200种
parser.add_argument('--classes', nargs='+', default=list(range(200)), type=int, help='filter by class')
parser.add_argument('--agnostic-nms', action='store_true', help='class-agnostic NMS')
parser.add_argument('--augment', action='store_true', help='augmented inference')
parser.add_argument('--evaluate', action='store_true', help='augmented inference')
parser.add_argument("--config_deepsort", type=str, default="deep_sort_pytorch/configs/deep_sort.yaml")
args = parser.parse_args()
args.img_size = check_img_size(args.img_size)
with torch.no_grad():
detect(args)
效果