基于深度学习的目标检测网络剪枝及FPGA部署
随着科技的发展,人工智能的发展正在促进计算机视觉的智能化广泛应用。如手
机上的语音识别可以将声音转化成文字、门禁识别人脸通行、美颜相机对人像加上跟
踪特效等,这些都是人工智能在我们生活中的应用。
人工智能对图像领域的研究方向被称为计算机视觉,而目标检测[1]-[2]是计算机视
觉的重要研究方向之一。目标检测的主要工作内容如图1 - 1所示,图像输入到目标
检测网络中,经过目标检测网络的处理,输出得到了一张标识出目标位置和类别的图
像。经过目标检测网络我们可以获得图像中目标的类别和位置,这一功能可以应用在
生活中的很多地方,比如行人过马路检测,目标检测可以在红灯时对闯红灯的行人进
行检测提醒;在工业中,目标检测可以对工件进行检测,识别出瑕疵品和合格品等等。 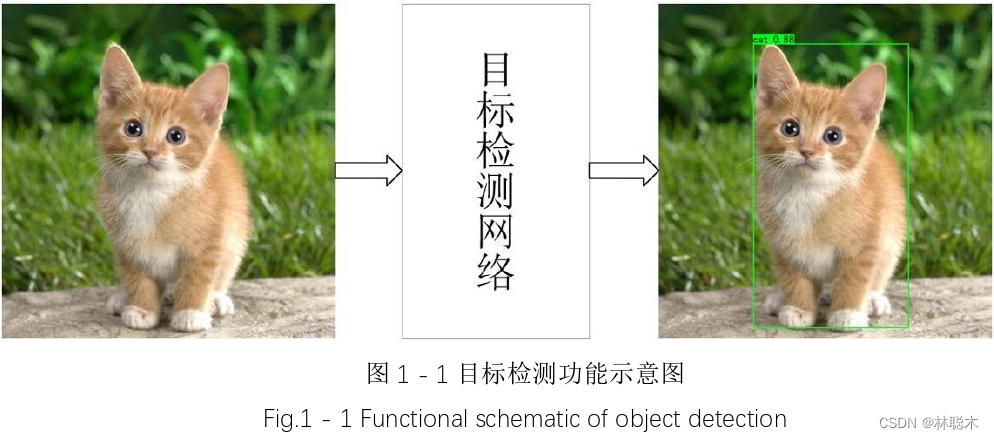
深度学习是人工智能的一个重要领域,深度学习提出[3]以来,人工智能领域得到
了极大的发展,在2012年ImageNet ILSVRC挑战赛 AlexNet[4]获得第一名之后,深度
学习得到了巨大的发展,各种表现优秀的深度神经网络结构相继出现,VGG[5]、
GoogLeNet[6]、ResNet[7]等非常优秀的经典卷积神经网络结构都是在此之后提出的。
目标检测技术随着深度学习的发展也得到了巨大的发展。2014年提出的RCNN[8]
是首个利用基于深度学习的卷积神经网络进行目标检测的经典网络。在此之后,基于
深度学习的目标检测也成为了研究的热门,Fast RCN