目录
1.RFB-Net介绍
2. RFB引入到yolov5
2.1修改commmon.py
2.2 修改yolo.py
2.3 yolov5s_REF.yaml
1.RFB-Net介绍

论文:https://arxiv.org/pdf/1711.07767.pdf
代码:https://github.com/ruinmessi/RFBNet
受启发于人类视觉的Receptive Fields结构,本文提出RFB,将RFs的尺度、离心率纳入考虑范围,使用轻量级主干网也能提取到高判别性特征,使得检测器速度快、精度高;具体地,RFB基于RFs的不同尺度,使用不同的卷积核,设计了多分支的conv、pooling操作(makes use of multi-branch pooling with varying kernels),并通过空洞卷积(dilated conv)来控制感受野的离心率,最后一步reshape操作后,形成生成的特征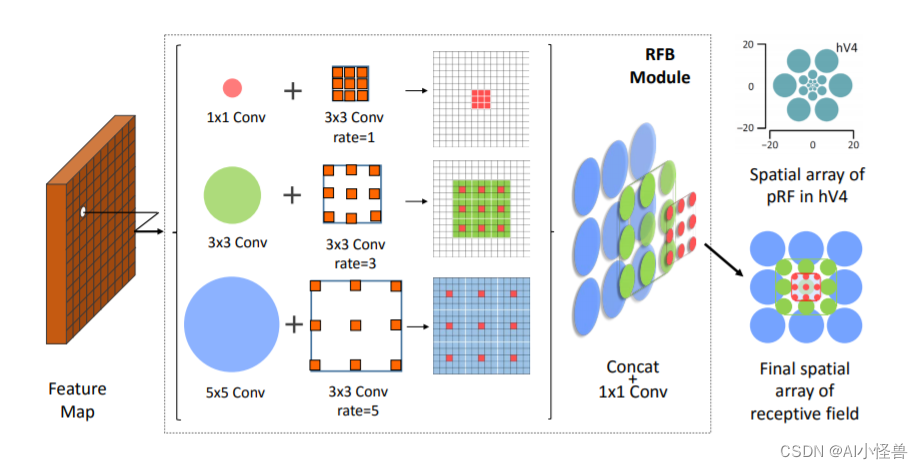
RFs也已被深入研究,如Inception、ASPP、Deformable CNN: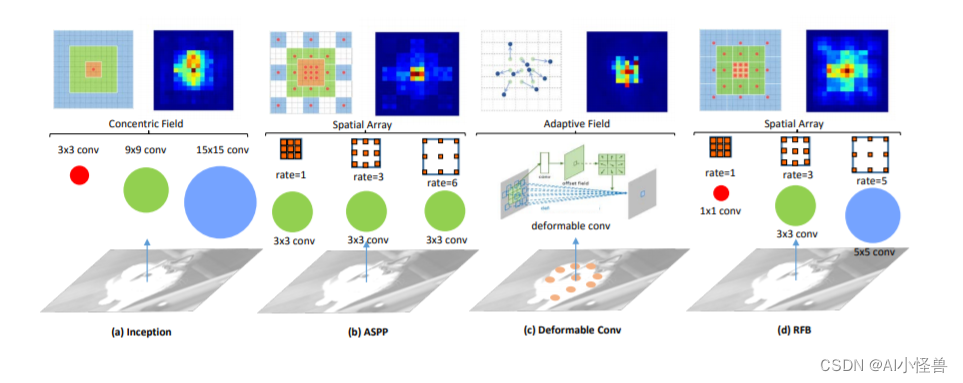
RFB模块是一个多分支的卷积模块,它的内部结构被划分为两部分:
1.多分支卷积层:根据RF的定义,使用多种尺寸的卷积核来实现比固定尺寸更好。具体设计:1.瓶颈结构,1x1-s2的卷积减少通道特征,然后加上一个nxn卷积。2.用5x5卷积替换为2个3x3的卷积去减少参数,这样可得到非线性结构更好的层。3.为了输出,卷积经常有stride=2或者是减少通道,所有直连层为了匹配维度用一个不带激活函数的1x1卷积层。
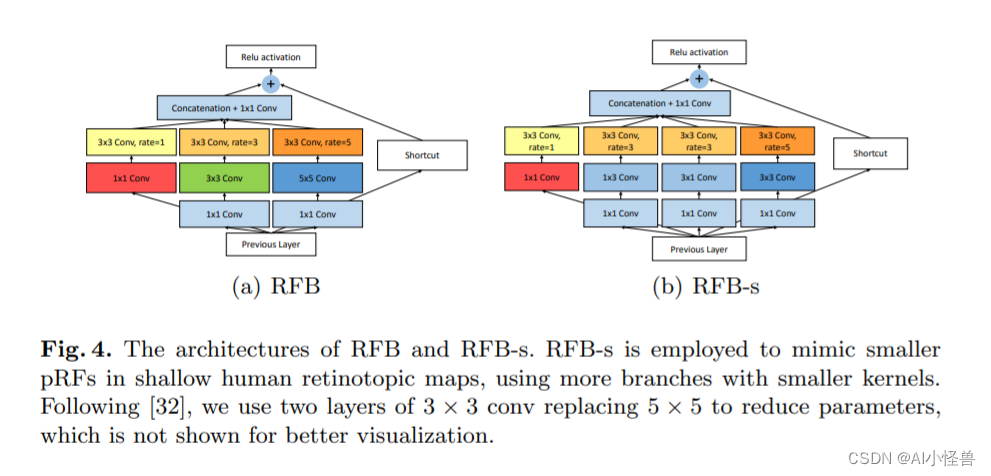
2.dilated 卷积层:在保持参数量可扩大感受野,用来获取更高分辨率的特征。下图展示了两种RFB结构:RFB和RFB-s。每个分支都是一个正常卷积后面加一个dilated卷积,主要尺寸和dilated因子不同。(a)RFB整体上借鉴了Inception的思想,主要不同点在于引入了3个dilated卷积层。(b)RFB-s和RFB相比主要有两个改进,一方面用3x3的卷积层代替5x5卷积层,另一方面用1x3和3x1的卷积来代替3x3卷积,主要目的是为了减少计算量,类似Inception后期版本对Inception结构的改进。
实验结果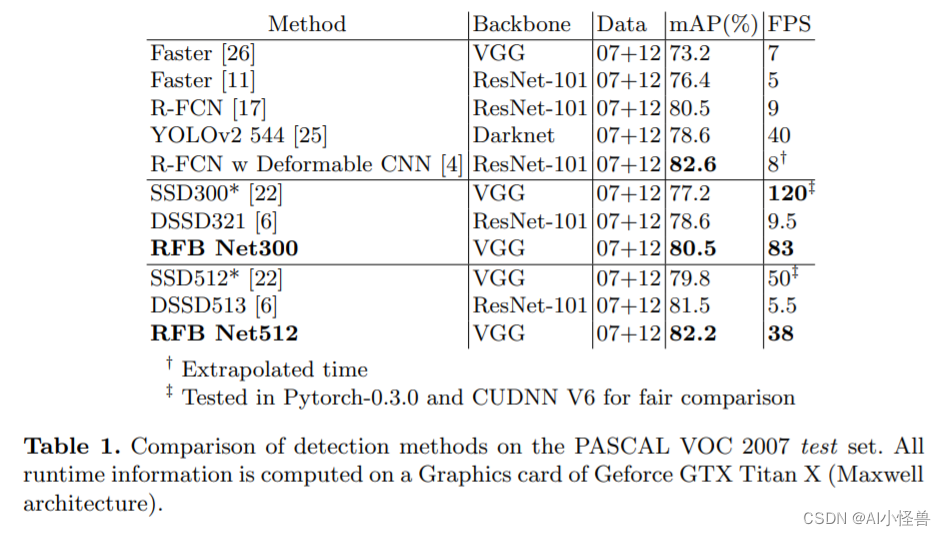
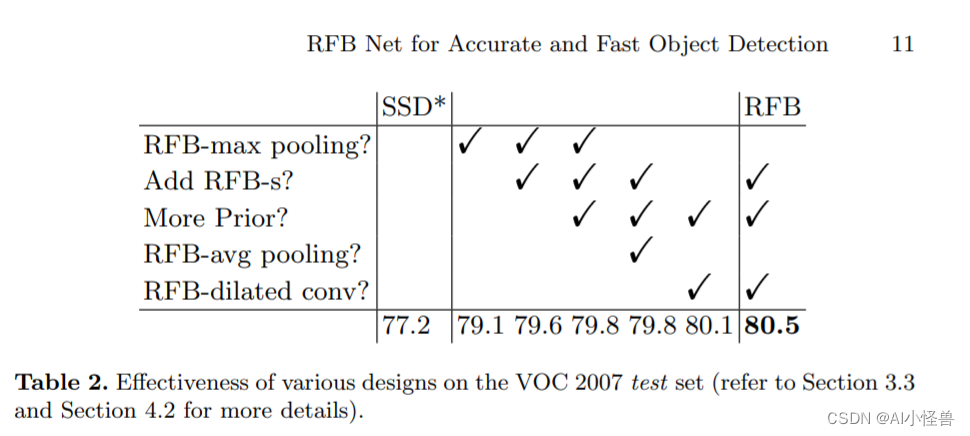
RFB模块:在table 2中,原始的SSD300实现了77.2%的mAP,通过简单的用RFB-max Pooling替代最后一个卷积层,我们将结果提升到了79.1%,获得了1.9%的提高,这表明了RFB模块的高效性。
2. RFB引入到yolov5
2.1修改common.py
class BasicRFB(nn.Module):
def __init__(self, in_planes, out_planes, stride=1, scale=0.1, map_reduce=8, vision=1, groups=1):
super(BasicRFB, self).__init__()
self.scale = scale
self.out_channels = out_planes
inter_planes = in_planes // map_reduce
self.branch0 = nn.Sequential(
BasicConv(in_planes, inter_planes, kernel_size=1, stride=1, groups=groups, relu=False),
BasicConv(inter_planes, 2 * inter_planes, kernel_size=(3, 3), stride=stride, padding=(1, 1), groups=groups),
BasicConv(2 * inter_planes, 2 * inter_planes, kernel_size=3, stride=1, padding=vision + 1,
dilation=vision + 1, relu=False, groups=groups)
)
self.branch1 = nn.Sequential(
BasicConv(in_planes, inter_planes, kernel_size=1, stride=1, groups=groups, relu=False),
BasicConv(inter_planes, 2 * inter_planes, kernel_size=(3, 3), stride=stride, padding=(1, 1), groups=groups),
BasicConv(2 * inter_planes, 2 * inter_planes, kernel_size=3, stride=1, padding=vision + 2,
dilation=vision + 2, relu=False, groups=groups)
)
self.branch2 = nn.Sequential(
BasicConv(in_planes, inter_planes, kernel_size=1, stride=1, groups=groups, relu=False),
BasicConv(inter_planes, (inter_planes // 2) * 3, kernel_size=3, stride=1, padding=1, groups=groups),
BasicConv((inter_planes // 2) * 3, 2 * inter_planes, kernel_size=3, stride=stride, padding=1,
groups=groups),
BasicConv(2 * inter_planes, 2 * inter_planes, kernel_size=3, stride=1, padding=vision + 4,
dilation=vision + 4, relu=False, groups=groups)
)
self.ConvLinear = BasicConv(6 * inter_planes, out_planes, kernel_size=1, stride=1, relu=False)
self.shortcut = BasicConv(in_planes, out_planes, kernel_size=1, stride=stride, relu=False)
self.relu = nn.ReLU(inplace=False)
def forward(self, x):
x0 = self.branch0(x)
x1 = self.branch1(x)
x2 = self.branch2(x)
out = torch.cat((x0, x1, x2), 1)
out = self.ConvLinear(out)
short = self.shortcut(x)
out = out * self.scale + short
out = self.relu(out)
return out
2.2 修改yolo.py
if m in {
Conv, GhostConv, Bottleneck, GhostBottleneck, SPP, SPPF,DWConv, MixConv2d, Focus, CrossConv,
BottleneckCSP, C3, C3TR, C3SPP, C3Ghost, CNeB, nn.ConvTranspose2d, DWConvTranspose2d, C3x, C2f,BasicRFB}2.3 yolov5s_REF.yaml3.
# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
# Parameters
nc: 1 # number of classes
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.50 # layer channel multiple
anchors:
- [10,13, 16,30, 33,23] # P3/8
- [30,61, 62,45, 59,119] # P4/16
- [116,90, 156,198, 373,326] # P5/32
# CSPNet-v5
backbone:
# [from, number, module, args]
[[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2
[-1, 1, Conv, [128, 3, 2]], # 1-P2/4
[-1, 3, C3, [128]],
[-1, 1, Conv, [256, 3, 2]], # 3-P3/8
[-1, 6, C3, [256]],
[-1, 1, Conv, [512, 3, 2]], # 5-P4/16
[-1, 9, C3, [512]],
[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
[-1, 3, C3, [1024]],
[-1, 1, SPPF, [1024, 5]], # 9
]
# YOLOv5 v6.0 head
head:
[[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 6], 1, Concat, [1]], # cat backbone P4
[-1, 3, C3, [512, False]], # 13
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 4], 1, Concat, [1]], # cat backbone P3
[-1, 3, C3, [256, False]], # 17 (P3/8-small)
[-1, 1, BasicRFB, [256]], # 18
[-1, 1, Conv, [256, 3, 2]],
[[-1, 14], 1, Concat, [1]], # cat head P4
[-1, 3, C3, [512, False]], # 21 (P4/16-medium)
[-1, 1, BasicRFB, [512]], # 22
[-1, 1, Conv, [512, 3, 2]],
[[-1, 10], 1, Concat, [1]], # cat head P5
[-1, 3, C3, [1024, False]], # 25 (P5/32-large)
[-1, 1, BasicRFB, [1024]], # 26
[[18, 22, 26], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
]